Plugfest 2009: Global Interoperability in Telerobotics and Telemedicine
Collaborator / Participants
H. Hawkeye King, Blake Hannaford
University of Washington, Seattle, WA, USA
Levi Miller, Daniel Glozman, Jacob Rosen
University of California, Santa Cruz, CA, USA
Thomas Low
SRI International, Menlo Park, CA, USA
Ka-Wai Kwok, Guang-Zhong Yang,
Imperial College London, London, UK
Paul Griffiths, Allison Okamura,
Johns Hopkins University, Baltimore, MD, USA
Ildar Farkhatdinov, Jee-Hwan Ryu,
Korea University of Technology and Education, Cheonan, Korea
Ganesh Sankaranarayanan, Venkata Arikatla,
Rensselaer Polytechnic Institute, Troy, NY, USA
Kotaro Tadano, Kenji Kawashima,
Tokyo Institute of Technology, Yokohama, Japan
Angelika Peer, Thomas Schauß, Martin Buss,
Technische Universit¨at M¨unchen, Munich, Germany
Despite the great diversity of teleoperator designs
and applications, their underlying control systems have many
similarities. These similarities can be exploited to enable interoperability
between heterogeneous systems. We have developed
a network data specification that can be used for Internet based
control of a wide range of teleoperators.
In this work we explore Internet based interoperable telerobotics,
focusing on the telesurgery application domain. Fourteen
globally dispersed telerobotic master and slave systems
were connected in thirty trials in one twenty four hour period.
Users performed common manipulation tasks to demonstrate
effective master-slave operation. With twenty eight (93%)
successful, unique connections the results show a high potential
for standardizing telerobotic operation. Furthermore, new
paradigms for telesurgical operation and training are presented,
including a networked surgery trainer and exoskeleton control
of micro-manipulators.
Using a new software protocol called the Interoperable Telesurgical Protocol (ITP), nine research teams from universities and research institutes around the world recently collaborated on the first successful demonstration of multiple biomedical robots operated from different locations in the U.S., Europe, and Asia. The new protocol was developed to standardize the way remotely operated robots are managed over the Internet. The protocol will allow engineers and designers that usually develop technologies independently, to work collaboratively, determine which designs work best, encourage widespread adoption of the new communications protocol, and help robotics research to evolve more rapidly. Early adoption of this protocol internationally will encourage robotic systems to be developed with interoperability in mind, and avoid future incompatibilities.
Several universities and research labs took part in the PLUGFEST 2009 event (July 30), where the different locations connected to each other through the new protocol to perform surgical robotic tasks, such as the peg transfer from FLS.
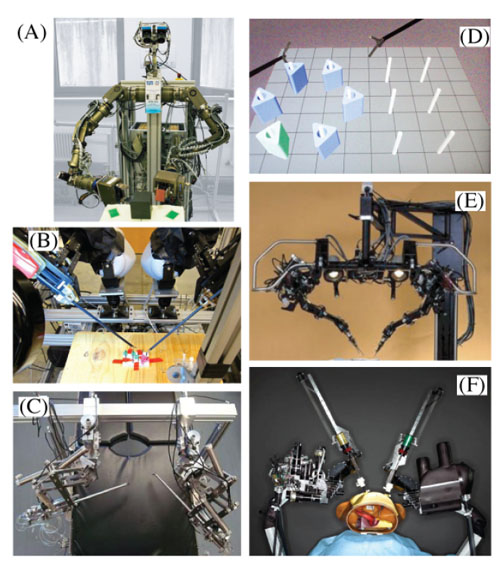
Figure: Slave Robotic Systems. (A) TUM general purpose Telerobot. (B) Patient-side robot of the
JHU custom version of the da Vinci. (C) TokyoTech IBIS IV surgical robot.
(D) RPI VBLaSTTM. (E) SRI M7 surgical robot. (F) UW Raven surgical
robot.
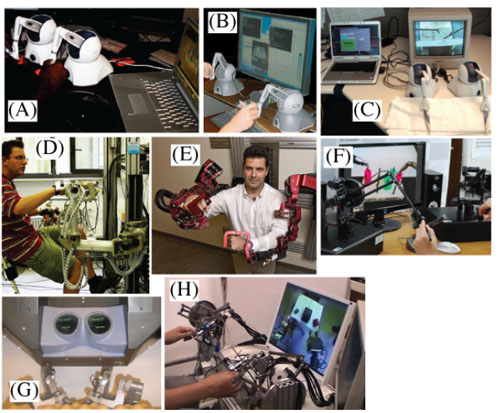
Figure: Master Robotic Systems (A, B, C) Phantom Omni control station with free software at RPI, ICL and UW respectively. (D) TUM ViSHaRD7. (E) UCSC Exoskeleton. (F) Phantom Premium with custom software at KUT. (G) Master console of the JHU custom version of the da Vinci. (H) TokyoTech delta master.
Device
| Status: Completed |
PUblications
(*) Note: Most of the Bionics Lab publications are available on-line in a PDF format. You may used the publication's reference number as a link to the individual manuscript.
IEEE Spectrum
|
Robot surgeons promise to save lives in remote communities, war zones, and disaster-stricken areas |

[![]() CP39] H. Hawkeye King, Blake Hannaford, Ka-Wai Kwok, Guang-Zhong Yang,Paul Griffiths3, Allison Okamura, Ildar Farkhatdinov, Jee-Hwan Ryu, Ganesh Sankaranarayanan, Venkata Arikatla, Suvranu De, Kotaro Tadano, Kenji Kawashima, Angelika Peer, Thomas Schuß, Martin Buss, Levi Miller, Daniel Glozman, Jacob Rosen, Thomas Low, Plugfest 2009: Global Interoperability in Telerobotics and Telemedicine, IEEE International Conference on Robotics and Automation, ICRA May 2010, Alaska, USA
CP39] H. Hawkeye King, Blake Hannaford, Ka-Wai Kwok, Guang-Zhong Yang,Paul Griffiths3, Allison Okamura, Ildar Farkhatdinov, Jee-Hwan Ryu, Ganesh Sankaranarayanan, Venkata Arikatla, Suvranu De, Kotaro Tadano, Kenji Kawashima, Angelika Peer, Thomas Schuß, Martin Buss, Levi Miller, Daniel Glozman, Jacob Rosen, Thomas Low, Plugfest 2009: Global Interoperability in Telerobotics and Telemedicine, IEEE International Conference on Robotics and Automation, ICRA May 2010, Alaska, USA
[![]() JP19] Harnett Brett, Charles Doarn. , Jacob Rosen, Blake Hannaford, and T. J. Broderick, Evaluation of Unmanned Airborne Vehicles and Mobile Robotic Telesurgery in an Extreme Environment, Vol. 14, No. 6 pp. 534-544, July/August 2008, Telemedicine and e-Health
JP19] Harnett Brett, Charles Doarn. , Jacob Rosen, Blake Hannaford, and T. J. Broderick, Evaluation of Unmanned Airborne Vehicles and Mobile Robotic Telesurgery in an Extreme Environment, Vol. 14, No. 6 pp. 534-544, July/August 2008, Telemedicine and e-Health
[![]() JP21] Mitchell J.H. Lum, Diana C. W. Friedman, , Ganesh Sankaranarayanan, Hawkeye. King, Kenneth Fodero II, Rainer Leuschke, Blake Hannaford, Jacob Rosen, Mika N. Sinanan, The RAVEN - A Multidisciplinary Approach to Developing a Telesurgery System, the International Journal of Robotic Research, Special Issue: Medical Robotics Part I: Vol. 28, No. 9, pp. 1183-1197, 1 September 2009;
JP21] Mitchell J.H. Lum, Diana C. W. Friedman, , Ganesh Sankaranarayanan, Hawkeye. King, Kenneth Fodero II, Rainer Leuschke, Blake Hannaford, Jacob Rosen, Mika N. Sinanan, The RAVEN - A Multidisciplinary Approach to Developing a Telesurgery System, the International Journal of Robotic Research, Special Issue: Medical Robotics Part I: Vol. 28, No. 9, pp. 1183-1197, 1 September 2009;
[![]() JP10] M.J.H. Lum, J. Rosen, M. N. Sinanan, B. Hannaford, Optimization of Spherical Mechanism for a Minimally Invasive Surgical Robot: Theoretical and Experimental Approaches, IEEE Transactions on Biomedical Engineering Vol. 53, No. 7, pp. 1440-1445, July 2006
JP10] M.J.H. Lum, J. Rosen, M. N. Sinanan, B. Hannaford, Optimization of Spherical Mechanism for a Minimally Invasive Surgical Robot: Theoretical and Experimental Approaches, IEEE Transactions on Biomedical Engineering Vol. 53, No. 7, pp. 1440-1445, July 2006
[![]() JP14] Doarn CR, Hufford K, Low T. Rosen J, Hannaford B. Telesurgery and Robotics: A Roundtable Discussion, Telemedicine and E-Health 2007; 13(4):369-380
JP14] Doarn CR, Hufford K, Low T. Rosen J, Hannaford B. Telesurgery and Robotics: A Roundtable Discussion, Telemedicine and E-Health 2007; 13(4):369-380
[![]() CP16]M.J.H. Lum, J. Rosen, M. N. Sinanan, B. Hannaford, Kinematic Optimization of a Spherical Mechanism for a Minimally Invasive Surgical Robot, 2004 IEEE International Conference on Robotics & Automation, pp. 829-834, New-Orleans, USA, April 26-30, 2004
CP16]M.J.H. Lum, J. Rosen, M. N. Sinanan, B. Hannaford, Kinematic Optimization of a Spherical Mechanism for a Minimally Invasive Surgical Robot, 2004 IEEE International Conference on Robotics & Automation, pp. 829-834, New-Orleans, USA, April 26-30, 2004
[![]() CP17]Rosen J., M. Lum, D. Trimble, B. Hannaford, M. Sinanan, Spherical Mechanism Analysis of a Surgical Robot for Minimally Invasive Surgery – Analytical and Experimental Approaches, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, Vol. 111. pp. 422-428, IOS Press, January 2005
CP17]Rosen J., M. Lum, D. Trimble, B. Hannaford, M. Sinanan, Spherical Mechanism Analysis of a Surgical Robot for Minimally Invasive Surgery – Analytical and Experimental Approaches, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, Vol. 111. pp. 422-428, IOS Press, January 2005
[![]() CP20 ]Lum M. J. H., D. Warden, J. Rosen, M. N. Sinanan, and B. Hannaford. Hybrid analysis of a spherical mechanism for a minimally invasive surgical (MIS) robot - design concepts for multiple optimizations. Proceedings of Medicine Meets Virtual Reality, Long Beach, CA, USA, January 2006.
CP20 ]Lum M. J. H., D. Warden, J. Rosen, M. N. Sinanan, and B. Hannaford. Hybrid analysis of a spherical mechanism for a minimally invasive surgical (MIS) robot - design concepts for multiple optimizations. Proceedings of Medicine Meets Virtual Reality, Long Beach, CA, USA, January 2006.
[![]() CP22]Fodero K. II, H. King, M.J.H. Lum, C. Bland, J. Rosen, M. Sinanan, B. Hannaford, Control System Architecture for a Minimally Invasive Surgical Robot Proceedings of Medicine Meets Virtual Reality, Long Beach, CA, USA, January 2006.
CP22]Fodero K. II, H. King, M.J.H. Lum, C. Bland, J. Rosen, M. Sinanan, B. Hannaford, Control System Architecture for a Minimally Invasive Surgical Robot Proceedings of Medicine Meets Virtual Reality, Long Beach, CA, USA, January 2006.
[![]() CP23] Lum M.J.H., D. Trimble, J. Rosen, K. Fodero II, H. King, G. Sankarayanaranan, J. Dosher, R. Leushke, B. Martin-Anderson, M.N. Sinanan, and B. Hannaford. Multidisciplinary approach for developing a new minimally invasive surgical robot system. Proceedings of the 2006 BioRob Conference, Pisa, Italy, February, 2006.
CP23] Lum M.J.H., D. Trimble, J. Rosen, K. Fodero II, H. King, G. Sankarayanaranan, J. Dosher, R. Leushke, B. Martin-Anderson, M.N. Sinanan, and B. Hannaford. Multidisciplinary approach for developing a new minimally invasive surgical robot system. Proceedings of the 2006 BioRob Conference, Pisa, Italy, February, 2006.
[![]() CP28] Lum M.J.H., J. Rosen, H. King, D.C.W. Friedman, G. Donlin, G. Sankaranarayanan, B. Harnett, L. Huffman, C. Doarn, T. Broderick and B. Hannaford, Telesurgery Via Unmanned Aerial Vehicle (UAV) With a Field Deployable Surgical Robot, Proceedings of Medicine Meets Virtual Reality (MMVR 15) pp. 313-315 , Long Beach CA, Feb. 6-9, 2007
CP28] Lum M.J.H., J. Rosen, H. King, D.C.W. Friedman, G. Donlin, G. Sankaranarayanan, B. Harnett, L. Huffman, C. Doarn, T. Broderick and B. Hannaford, Telesurgery Via Unmanned Aerial Vehicle (UAV) With a Field Deployable Surgical Robot, Proceedings of Medicine Meets Virtual Reality (MMVR 15) pp. 313-315 , Long Beach CA, Feb. 6-9, 2007
[![]() CP31] Mitchell Lum, Diana Friedman, Hawkeye King, Regina Donlin, Ganesh Sankaranarayanan, Timothy Broderick, Mika Sinanan, Jacob Rosen and Blake Hannaford, Teleoperation of a Surgical Robot via Airborne Wireless Radio and Transatlantic Internet Links, The 6th International Conference on Field and Service Robotics, July 9-12 2007, Chamonix, France
CP31] Mitchell Lum, Diana Friedman, Hawkeye King, Regina Donlin, Ganesh Sankaranarayanan, Timothy Broderick, Mika Sinanan, Jacob Rosen and Blake Hannaford, Teleoperation of a Surgical Robot via Airborne Wireless Radio and Transatlantic Internet Links, The 6th International Conference on Field and Service Robotics, July 9-12 2007, Chamonix, France
[![]() CP32] G. Sankaranarayanan, B. Hannaford, H. King, S.Y. Ko, M. Lum, D. Friedman, J. Rosen, and B. Hannaford, Portable Surgery Master Station for Mobile Robotic Surgery, Proceedings of the ROBOCOMM, the first International, conference on Robot Communication and Coordination, Athens, Greece, Oct 2007
CP32] G. Sankaranarayanan, B. Hannaford, H. King, S.Y. Ko, M. Lum, D. Friedman, J. Rosen, and B. Hannaford, Portable Surgery Master Station for Mobile Robotic Surgery, Proceedings of the ROBOCOMM, the first International, conference on Robot Communication and Coordination, Athens, Greece, Oct 2007
[![]() CP33] M. J.H. Lum, D. C. W. Friedman, G. Sankaranarayanan, H. King, A. Wright, M. Sinanan, T. Lendvay, J. Rosen, B. Hannaford, Objective Assessment of Telesurgical Robot Systems: Telerobotic FLS, Medicine Meets Virtual Reality (MMVR 16) pp. 263-265, Long Beach CA, Jan. 29 - Feb. 1, 2008
CP33] M. J.H. Lum, D. C. W. Friedman, G. Sankaranarayanan, H. King, A. Wright, M. Sinanan, T. Lendvay, J. Rosen, B. Hannaford, Objective Assessment of Telesurgical Robot Systems: Telerobotic FLS, Medicine Meets Virtual Reality (MMVR 16) pp. 263-265, Long Beach CA, Jan. 29 - Feb. 1, 2008