Goals & Mission
The Bionics Lab at UCLA is a research group aiming to develop science, technology, and human resources at the interface between robotics, biological systems, and medicine. The goal is to produce useful, innovative research and technology as well as trained researchers fluent in both science, engineering, biological systems, and robotics. The primary research fields of the Bionics Lab are medical robotics and biorobotics including surgical robotics, and wearable robotics as they apply to the following fields: control, human motor control, neural control, human and brain machine interfaces, motor control rehabilitation (stroke), brain plasticity, haptics, virtual reality, teleoperation, biomechanics (full body kinematics and dynamics as well as soft/hard tissues biomechanics).
Research in these fields is conducted as part of collaboration efforts with the UCLA medical school – Dept. of Surgery - Center for Advanced Surgical and Interventional Technology (CASIT), Dept. of Ophthalmology - Advanced Robotic Eye Surgery (ARES) Laboratory, as well as other medical schools such as UCSF and University of Washington.
Principal Investigator / Lab Director : Jacob Rosen
Research
|
Robotic systems that are worn by the human operator as an orthotic devices and used as a human-amplifier, assistive device, haptic device, or for automatic physiotherapy and rehabilitation. |
|
Robotic devices enabling the surgeon to learn and perform minimally invasive and open surgery safely and effectively. |
|
|
Bionics - Definition
Wikipedia
Bionics (also known as biomimetics, biognosis, biomimicry, or bionical creativity engineering) is the application of biological methods and systems found in nature to the study and design of engineering systems and modern technology. The word "bionic" was coined by Jack E. Steele in 1958, possibly originating from the Greek word "βίον", pronounced "bion", meaning "unit of life" and the suffix -ic, meaning "like" or "in the manner of", hence "like life". Some dictionaries, however, explain the word as being formed from "biology" + "electronics".
- Marriam-Webster
bi·on·ics, Pronunciation:\bī-ä-niks\; Function: noun plural but singular or plural in construction; Etymology: 2bi- + -onics (as in electronics), Date: 1960; Definition : a science concerned with the application of data about the functioning of biological systems to the solution of engineering problems.
YouTube Channeles Senior Capstone Design (MAE162E & ECE183DB) - This YouTube channel includes presentations of the Capstone Design senior class at UCLA. Each groups includes students from the mechanical and the electrical engineering departments designing collaboratively engineering systems. The class is instructed by Jacob Rosen (MAE) and Ankur Mehta (ECE) |
News
Wearable Robotics: Systems and Applications
Jacob Rosen Peter Ferguson (Editors)
Wearable Robotics: Systems and Applications provides a comprehensive overview of the entire field of wearable robotics, including active orthotics (exoskeleton) and active prosthetics for the upper and lower limb and full body. In its two major sections, wearable robotics systems are described from both engineering perspectives and their application in medicine and industry. Systems and applications at various levels of the development cycle are presented, including those that are still under active research and development, systems that are under preliminary or full clinical trials, and those in commercialized products. This book is a great resource for anyone working in this field, including researchers, industry professionals and those who want to use it as a teaching mechanism.
Publisher: Academic Press / Elisevier; 1st Edition. (2019)
Hardcover: 550 pages
Language: English
ISBN: 978-0-128-14659-0
Wear a Robot – Strike Stroke - TEDx Palo Alto 2018
Togather with: Frederick Schwedner, Yang Shen, and Ji Ma April 2018
MAE Professor Jacob Rosen delivered his talk entitled “Wear a Robot – Strike Stroke” at TEDx Palo Alto 2018. The talk covered his personal journey in science, exploring principles such as symmetry and redundancy and their application in human body motion, the implication of stroke on the motor control system, and his scientific efforts in developing upper limb exoskeleton systems to recover the motor control of stroke patients using dual arm modes. In these modes, both the arm affected by stroke as well as the arm that was unaffected are involved in the physical therapy, while the wearable exoskeleton system provides assistance as needed – as the patient interacts with virtual objects in virtual worlds. A dual arm physical therapy engages the left and the right hemispheres simultaneously while maximizing brain plasticity as part of the brain’s efforts to recover lost functions. The talk included a patient showing the audience the motor control implications of stroke and the physical disabilities associated with it, following by a demonstration of the dual arm exoskeleton as a system that can be incorporated into the physical therapy following stroke, and offers a paradigm shift in recovering lost motor control functions.




UCLA Dept. of MAE Press Release
Peter Ferguson - Engineering, Robotics, and Exoskeletons - Generation Genius
Bionics lab PhD student Peter Ferguson discusses engineering and robotics for Generation Genius (The Lab Report with Dr. Jeff - Kids Show ).
![]()
![]()
![]()
BioRobotics - An Overview of the Bionics at UCLA
By
Diana Wehmeier / Judit Agui / Katinka Schuett
This Scientist's Robots Might One Day Perform Surgery in Space By S.C. Stuart April 21, 2018 |
Robotics May Drive the Future of Healthcare
Nov 3, 2017
By Katherine Kornei
“The entire field of medicine is shifting from a human-based service provider to automation enabled by artificial intelligence (AI),” says Rosen. “This trend is promoted and enabled in part by robotic technology.” Rosen is quick to note that robots aren’t entirely replacing humans, however. “The human is still in the loop as a decision maker.”
UCLA School of Engineering Press Release
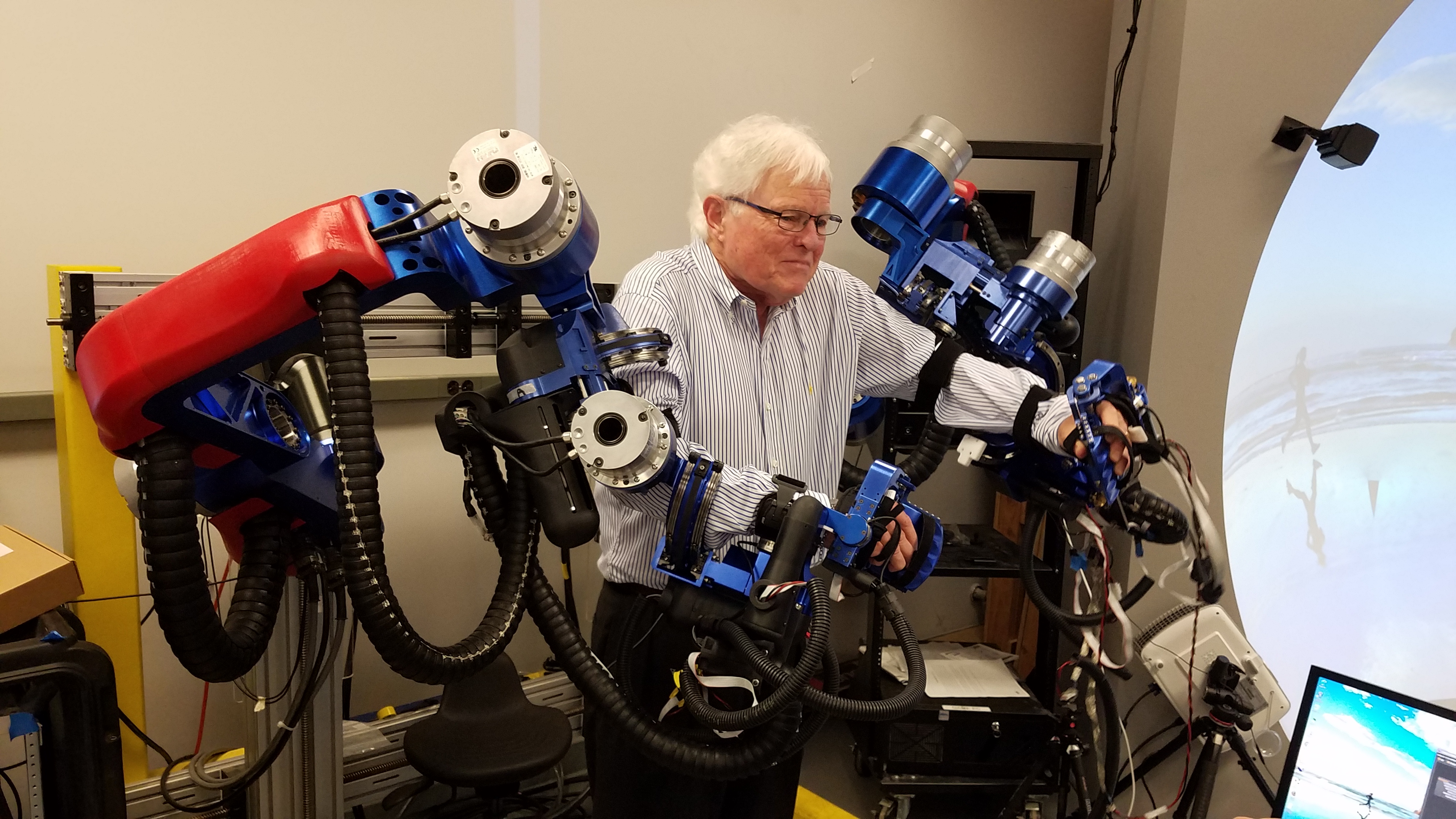
EXO-UL8 Dual Arm/Hand 8 DOF Upper Limb Wearble Exoskeleton
EXO-UL8 robotic system is one of the most advanced dual arm wearable exoskeleton systems available today. It includes a total of 16 Degrees of freedom (DOF) – 8 DOF per arm (7 DOF arm & 1 DOF hand). The system is fully integrated and it is currently tested with various algorithms as a therapeutic modality for Stroke along with a set of virtual reality (VR) tasks. The VR tasks include both diagnostic tasks and therapeutic tasks.


Surgical Robotics & Wearable Robotics
Everting IoT (Internet of Things) Global Leadership Summit 2017
OCt. 11-12, 2017, Sydney Australia,
Eitan Binstock (Organizer & Host)







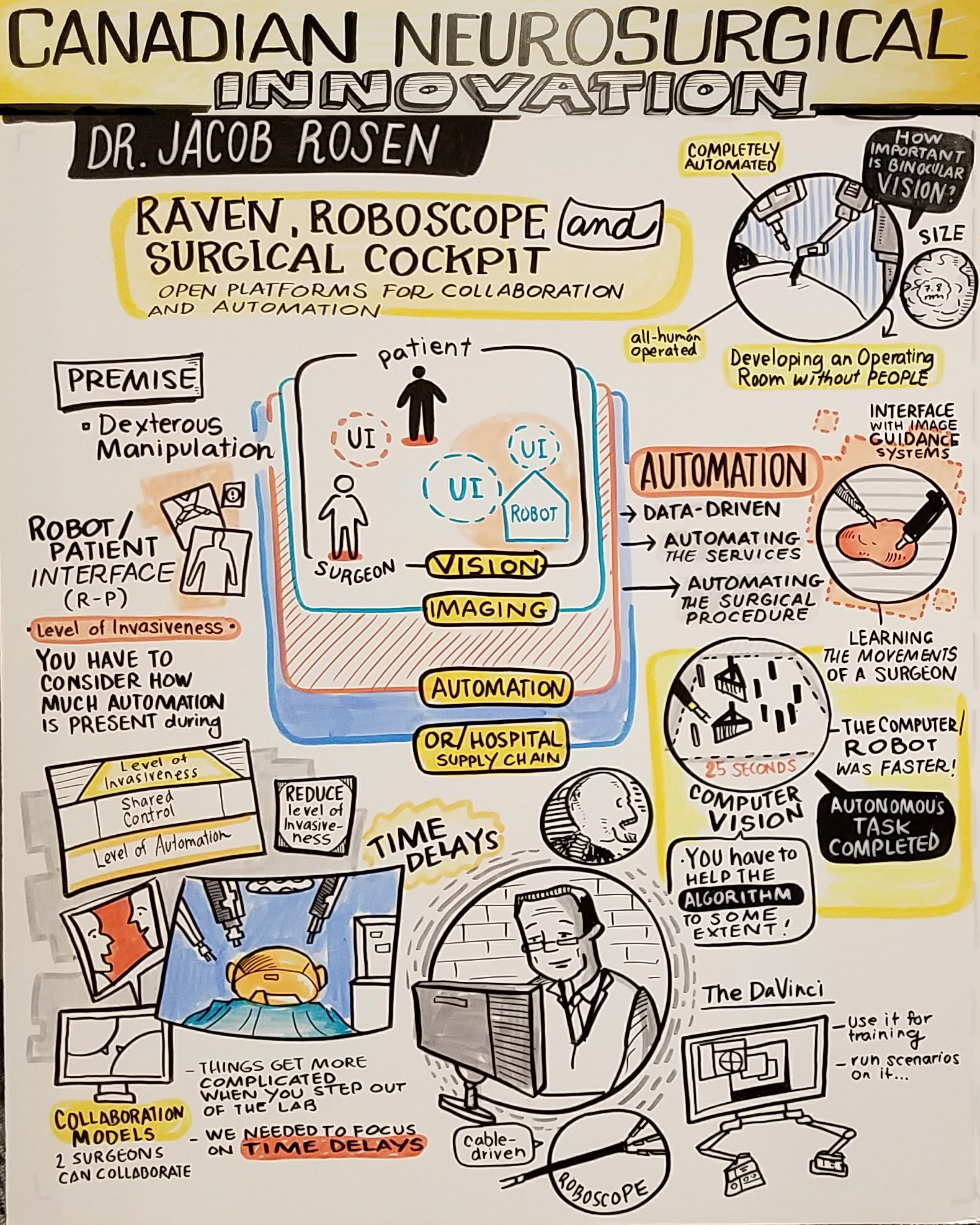
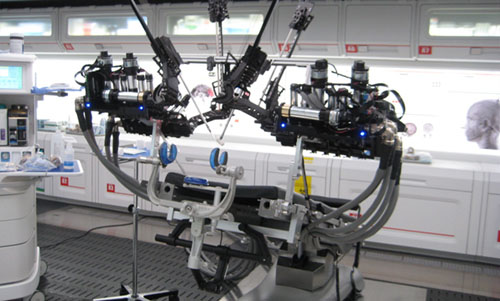
Roboscope the Surgical Cockpit and Automation in Neurosurgery,
Canadian Neurosurgical Innovation Meeting,
Toronto, ON Spt. 10-11, 2016
![]()
Dec. 2017
The paper co-authored by Joel Perry, Jacob Rosen, and Stephen Burns MD, and entitled "Upper-Limb Powered Exoskeleton Design" is listed by the IEEE/AMSE Transactions of Mechatronics and published on Oct. 13 2007 (IEEE Xplore) as one of the highly cited / popular papers (321 paper citations, 6 patent citations, 7665 full text views according to IEEE Xplore; 535 citations according to Google Scholar as of Dec. 2017).
The paper was written together Dr. Rosne’s former graduate student Dr. Joel Perry, now a Professor at the University of Idaho, and his former colleague Dr. Stephen Burns, who is a professor of Rehabilitation Medicine at the UW. The EXO-UL7 dual arm exoskeleton robotic system that was well ahead of its time both form the engineering, scientific and the medical perspective. Dr. Perry was Dr. Rosen’s Ph.D. student and this work in designing and studying the system serves as millstone in an evolving effort of integrating robotics into physical rehabilitation. This effort continues to evolve as now both Drs. and Rosen develop new systems. They along with other colleagues at the University of Idaho are collaborating on developing a new exoskeleton system which includes a dexterous multi fingers hand and more complex shoulder joint as part of a NSF award.
Perry Joel C., Jacob Rosen, Stephen Burns, Upper-Limb Powered Exoskeleton Design, IEEE Transactions on Mechatronics, Volume 12, No. 4, pp. 408-417, August 2007
PDF
IEEE Xplore - IEEE/ASME Transactions on Mechatronic
2017 SoCal Robotics Symposium (SCR) - Best Poster Award

Graduate students Sahba Pedram and Peter Ferguson along with post doc Ji Ma Ph.D. won the best poster award at the 2017 SoCal Robotic Symposium who was attended by students and faculty members from USC, UCLA, UCSB, UCSD, CalTech, and JPL. This work is a result of an on going research efforts with Dr. Erik Dutson at the UCLA Center for Advanced Surgical and Interventional Technology (CASIT) and the Department of Surgery in general field of automation in surgical robotics.
Interview with Joanne Pransky (Associate Editor for Industrial Robot Journal (June 2016)
Q1: Your philosophy seems to be very much one of collaboration between research groups in the development of the RAVEN and also the end goal of collaboration between surgeons working together on a single patient. Is this an accurate summary? And where did this drive towards collaboration originate?
Q2: How did you first come up with the concept of the RAVEN?
Q3: What significant developments in the RAVEN have originated from one of the developers?
Q4:What are the technical risks of collaboration?
Q5: What modification does the RAVEN IV have that differ from the previous RAVEN version?
Q6: Do you have any plans for clinical trials?
Q7: Are electromyography (EMG) and the electrochemical mechanical delay the key to developing natural-feeling exoskeletons?
Q8: Can you talk about the funding and
intellectual property of your other companies:
Exosense and SPI and about the greatest
challenges you faced with each of these
companies?
Q9: What is the greatest mistake or the greatest lesson that you have learned?
Q10: Let’s assume that your life is only 50
per cent complete. What groundbreaking
challenges do you think you’ll be working on 25
and 50 years from now?
Q11: What do you think is the single most
important thing we can be doing for our PhDs
to prepare them for the commercial world?
NBC - Heartbeat - Season 1 Episode 5 - Raven IV
Aired on NBC April 20, 2016
NBC - Heartbeat - The Land of Normal S1 E5
The RAVEN Scenes - (Streaming Video)

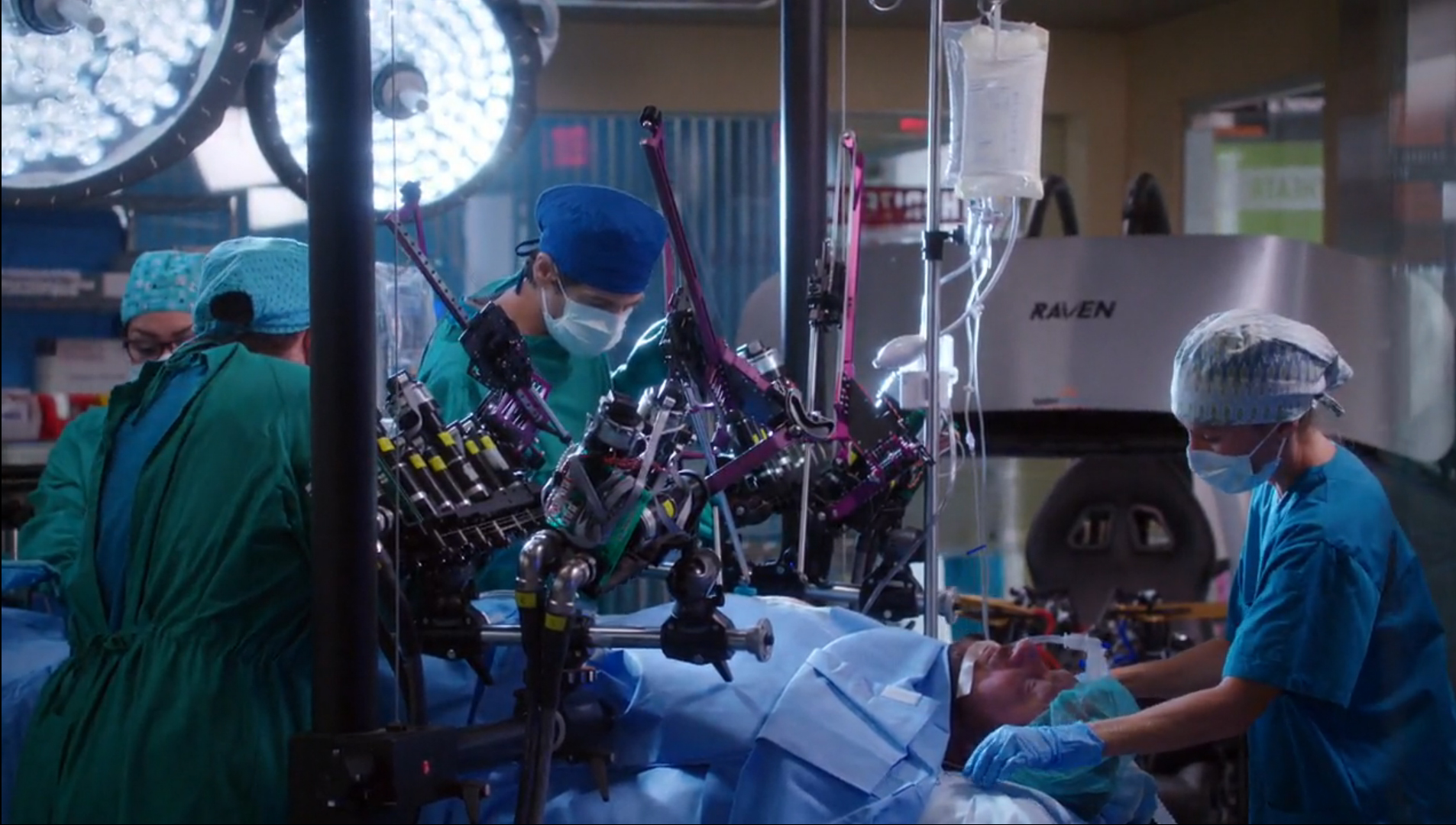






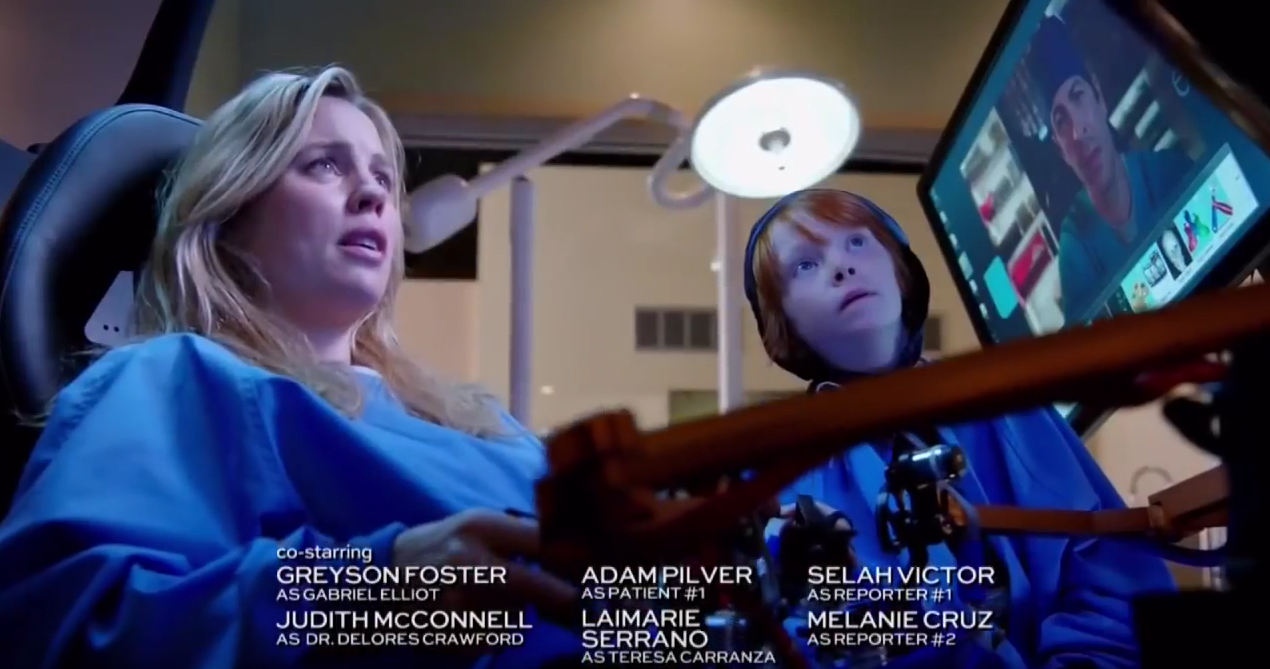
Photo Credit: NBC, Ji Ma
SwissNex - ETH Zürich meets California - with Homayoon Kazerooni, Robert Riener, Henry Evans, and Benjamin Bollmann (moderator)
San Francisco, April 7, 2016
Cybathlon: Assistive Robotic Tech to Navigate the World - Event Details

Demo of Virtual Reality (VR) Tasks for Stroke Rehabilitation - The user is immersed in a VR using VR googles and the task can be performed with the two arm Exoskeleton system with haptics or with without it using the Kinect.
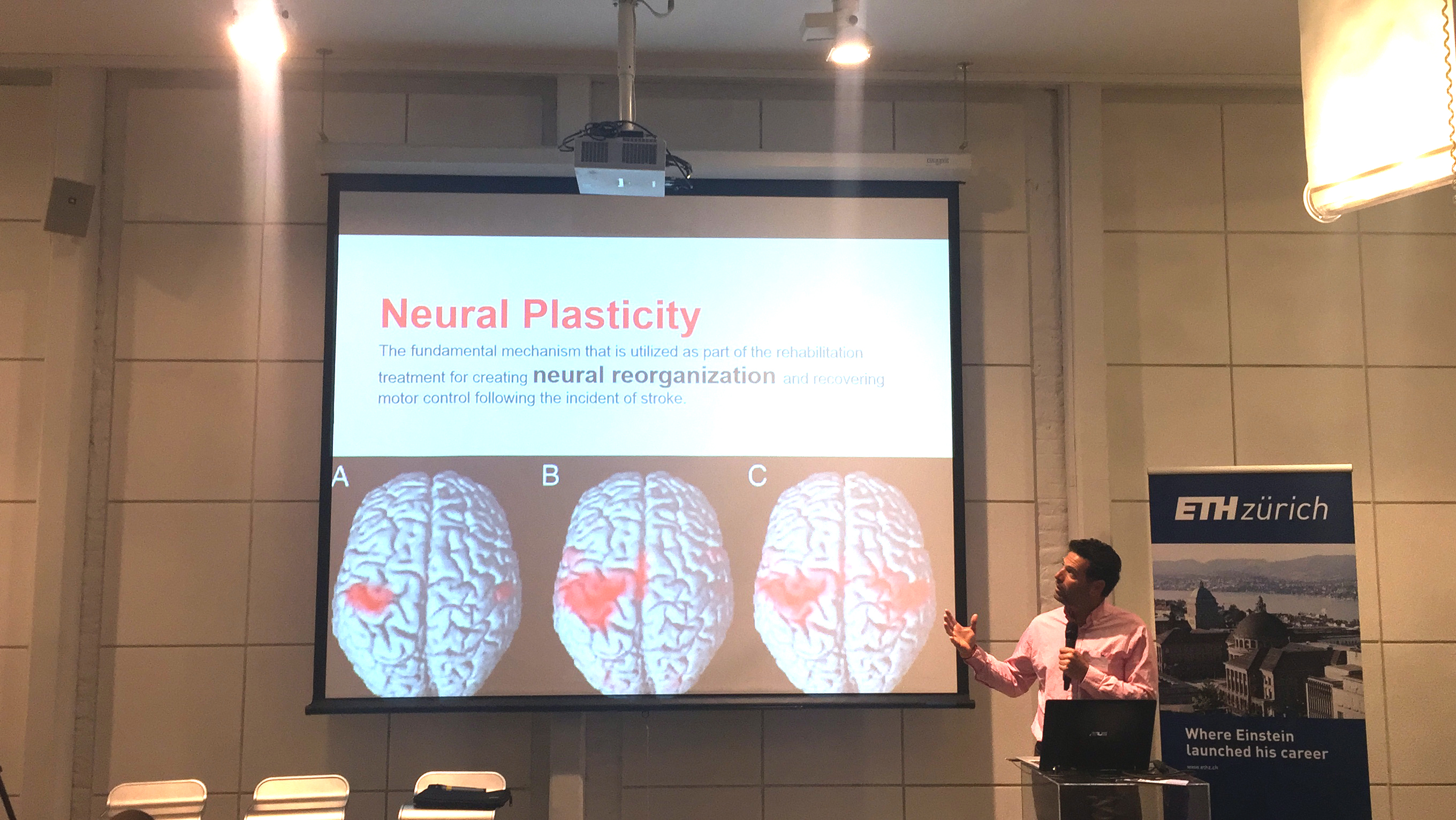











Photo Credit: SwissNex, Yang Shen
Metamorphosis: Human, Animal, Armor
International Conferance UC Santa Barbara Dec. 3-5, 2015

|
Xconomy Forum
Robot Madness - Boston March 11, 2015 - Spotlight Talks - Robots for Rehab
Robot Madness West - SRI April 7, 2015 - Raven - The Surgical Robot

![]()
This Is What a Realistic Gundam Suit Will Be Like
May 14 2015
Boosting the Upper Limb Too
The majority of exoskeletons currently on the market only focus on the lower body. For one, demand is simply higher—your legs are what give you mobility, after all. Two, upper body problems are tougher to solve, because the range of motion is more complex.
“The ability to pick up a cup of coffee and moving it around is more complicated than moving your feet forward,” says professor Jacob Rosen, director of UCLA’s Bionics Lab. He specializes in working with stroke patients, who often have one healthy, mobile arm, and one that is paralyzed. The goal is to use exoskeletons to restore life to the affected arm.
“We are designed to deal with an environment that is hard to predict,” Rosen says. “That’s why we have two arms, two lungs, two kidneys.” And since we’re not starfish that can sprout backup extremities, we have to get a bit more creative in how we adapt to such situations.
The UCLA Bionics Lab is currently outfitting stroke patients with robotic arms using a technique called “mirror image.” Patients put both arms (one healthy, one paralyzed) in exoskeletal sleeves and then begin navigating a virtual reality system—for example, playing a squash game. Every time the patient moves the healthy arm, electrical signals are sent to the other sleeve, which moves the paralyzed arm in the same fashion. This could help stroke victims “relearn” how to use their upper limbs.
In another activity that also resembles physical therapy, an “artificial force field” is created. The exoskeleton will help a paralyzed arm move within a restricted space. In the game, the patient must “paint” a virtual surface, but every time the arm strays from the area that’s supposed to be painted, the robotic sleeve pushes the paralyzed arm back, replacing the need for another human to physically force the patient’s arm to move in certain ways in order to rebuild mobility.
The Robotics program at UCLA
Mechanical and Aerospace Engineering Dept. Annual Report [PDF]
School of Engineering Annual Report [PDF]

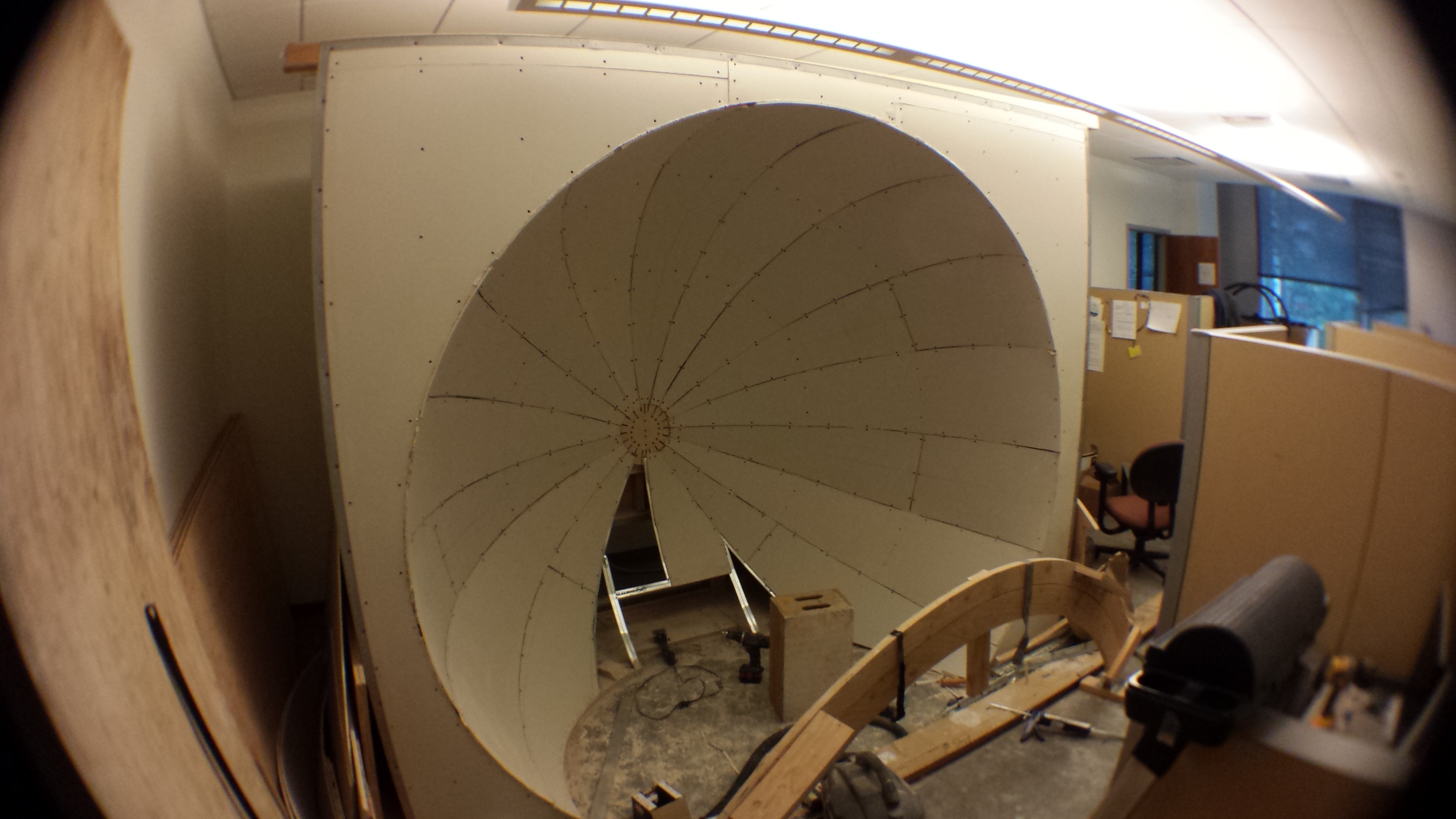
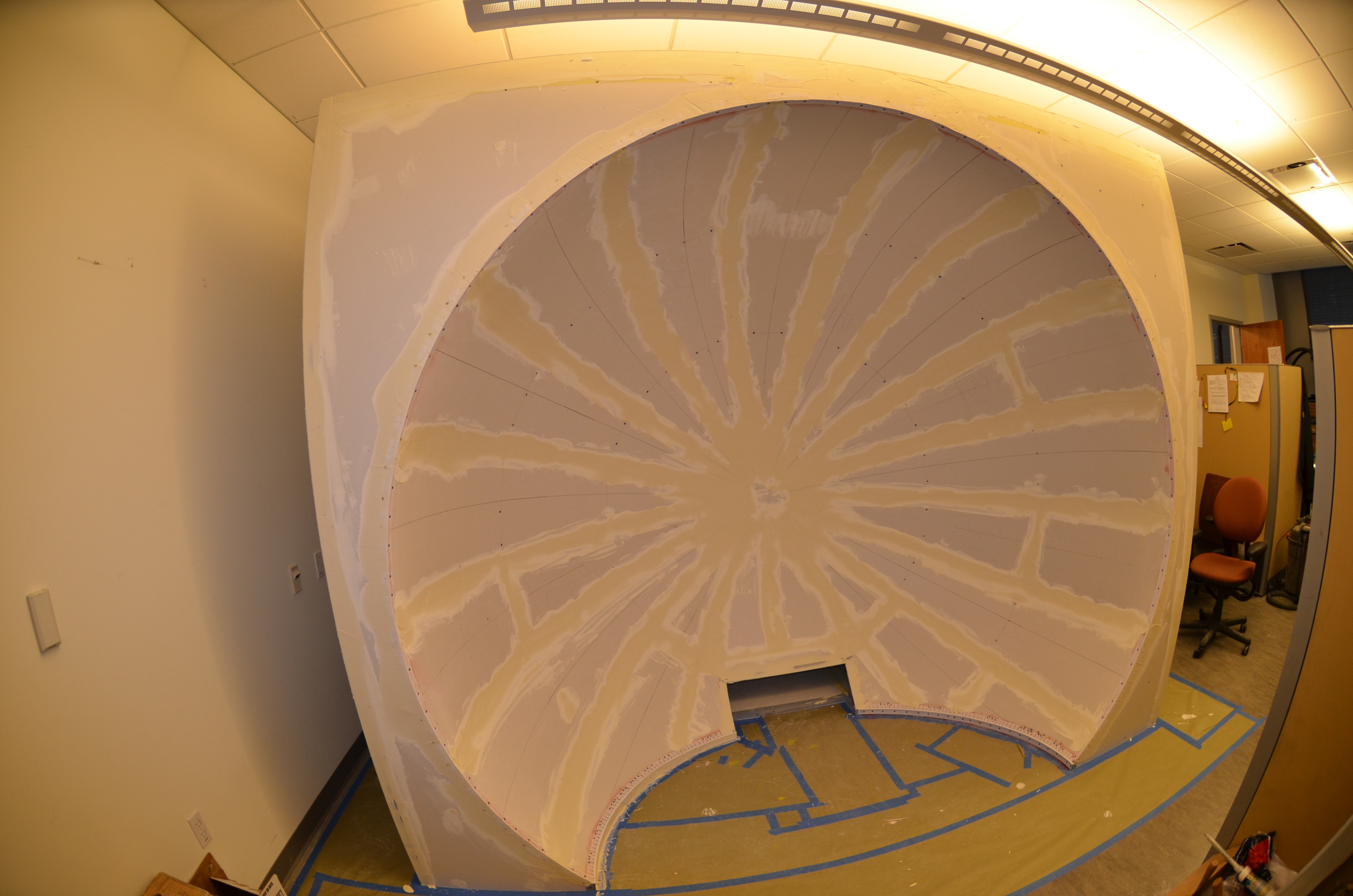
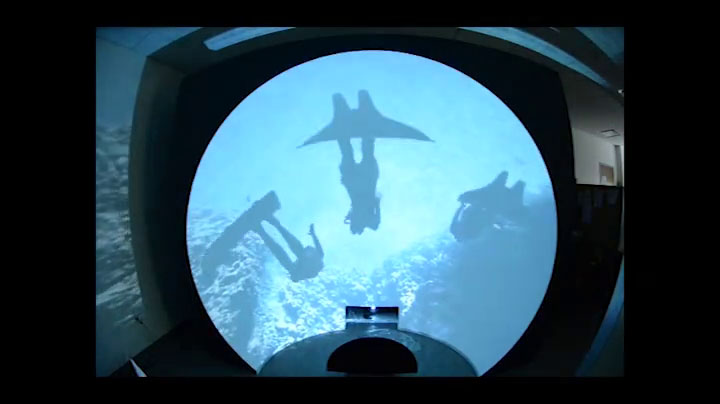
The Dome
Panoramic screen for projecting immersed video/audio and virtual reality (VR)
The Dome - (Streaming Video)
Dome - Specifications
Purpose: Geometry & Vision Stracture: |
Panoramic Screen
Projector Located at the Base |




 |
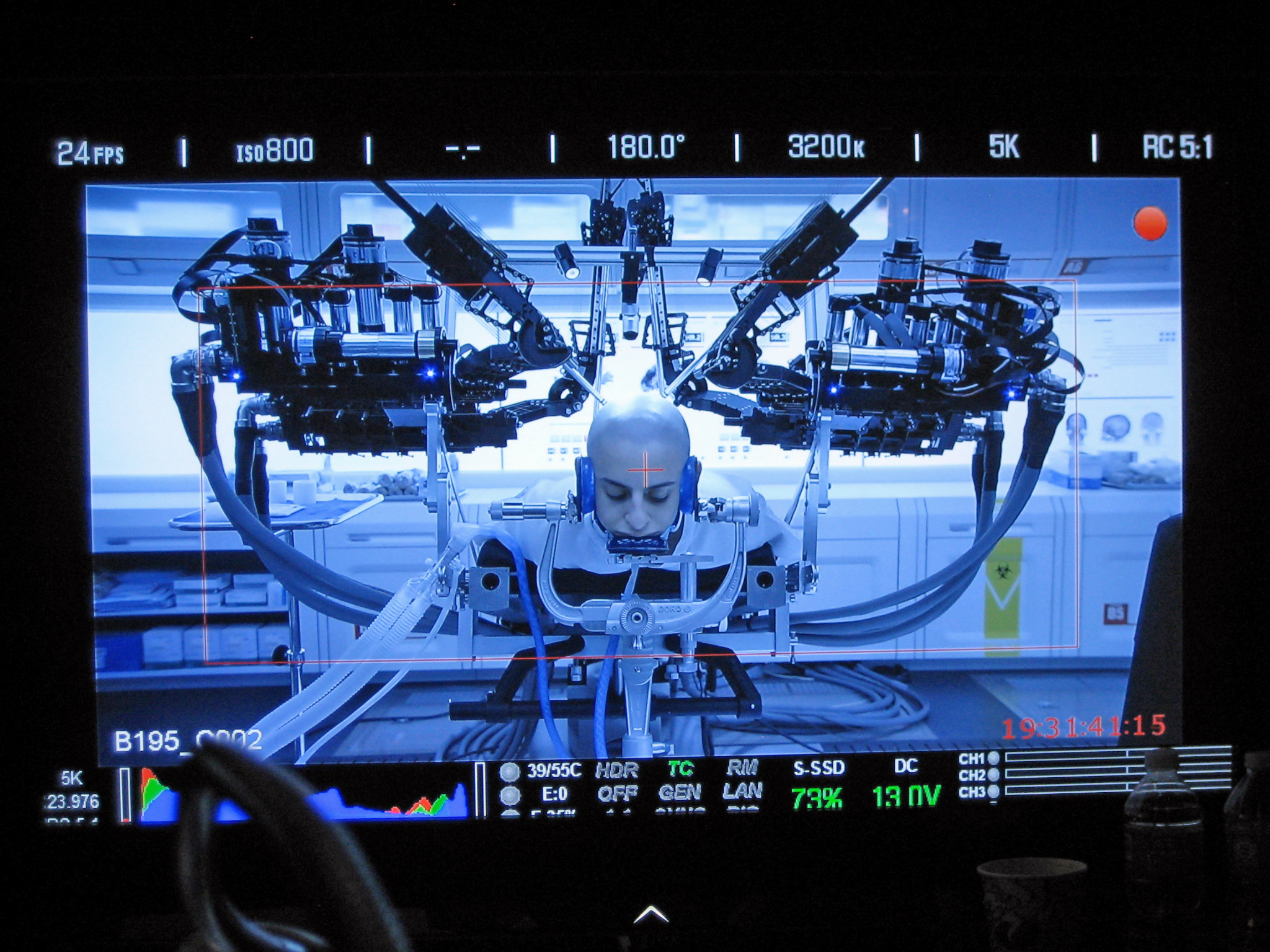
In the recent movie adaptation of Orson Scott Card’s book Ender’s Game, a key character undergoes emergency brain surgery in an attempt to save his life after suffering a traumatic head injury in a space station. In this orbiting operating room of the future, no human surgeons are in sight. Instead, a four-armed surgical robot executes the delicate procedure, controlled remotely by ground-based surgeons. By the time the movie was released, NASA and Applied Dexterity, a medical robotics company spun out from the University of Washington, were already exploring sending a modified RAVEN™, the same robot that played a cameo in the movie, up to the ISS. So, what is RAVEN? How will it be used in the ISS? And, how will these developments impact healthcare and engineering progress on Earth? |
Ender's Game - Raven II
The surgical robot Raven II - a robot that was developed as a colaborative effort by UCSC and UW was featured in 'Ender's Game' movie - (58min).
Raven Scene in Ender's Game (Streaming Video)
 |
 |
 |
Surgical robot built at UCSC featured in 'Ender's Game' movie - UCSC Press Release
UCSC robot stars in blockbuster Ender's Game - Santa Cruz SentinelMeet the real-life robo-surgeon who fixes brains in 'Ender's Game - NBC News
UW surgical robot featured in 2013 movie ‘Ender’s Game’ - UW Press Release
Robot Control |
Meet your next surgeon: Dr. Robot - Fortune Magazine |
Undergraduate Researcher Profile: Ariel Anders
What project and lab/research group did you work with?
What was the lab or research group’s culture like?
Describe a typical day for you in the lab.
There rarely was a typical day in the lab! My project was very versatile, so for one week I might be working on a similar topic and the next couple of weeks I would work on something completely different. Typically, Professor Rosen and I had weekly meetings at the beginning of the week where we would set up what my goals were for that week. The next week, we would evaluate how those goals were accomplished and set new ones or change the existing ones. If I stumbled into a challenge during the week, Rosen had an open door policy and I could meet with him earlier and discuss different strategies.
Redundancy in Robot Manipulators and Multi-robot systems The trend in the evolution of robotic systems is that the number of degrees of freedom increases. This is visible both in robot manipulator design and in the shift of focus from single to multi-robot systems. Following the principles of evolution in nature, one may infer that adding degrees of freedom to robot systems design is beneficial. However, since nature did not select snake-like bodies for all creatures, it is reasonable to expect the presence of a certain selection pressure on the number of degrees of freedom. Thus, understanding costs and benefits of multiple degrees of freedom, especially those that create redundancy, is a fundamental problem in the field of robotics. This volume is mostly based on the works presented at the workshop on Redundancy in Robot Manipulators and Multi-Robot Systems at the IEEE/RSJ International Conference on Intelligent Robots and Systems - IROS 2011. The workshopwas envisioned as a dialog between researchers from two separate, but obviously relatedfields of robotics: one that deals with systems having multiple degrees of freedom, including redundant robot manipulators, and the other that deals with multirobot systems. The volume consists of twelve chapters, each representing one of the two fields. |
UCSC 2012 State of the Campus
Chancellor George Blumenthal
"...
Here are five recent examples of UCSC's global reach.
we developed advanced robotic surgery systems for medical research. Here's what I particularly love: Computer Engineering Professor Jacob Rosen developed this technology--with the help of undergraduates--and even though he and a collaborator at the University of Washington spent more than a decade working on this, he gave away the results to competing labs, because a common research platform means the whole field will be able to advance more quickly.
..."
 |
|
University of California - Research Profile - Jacob Rosen - Engineering - Santa Cruz
University of California Research
July 1, 2012
A Robot's Touch - Science Note
Sara Keller - UCSC - Science Communication Program
July 1, 2012
Health Care Hero - Silicon Valley Business Journal,
I share this honor with three individuals and one institute who made it all possible. ..." |
The Story About Raven
SLUG REPORT > Collaboration was key to new open sourced surgical robots
BY ALEJANDRO TREJOPOSTED
Good Times
JANUARY 25, 2012

RAVEN II - Open Source Surgical Robotic System
UCSC Press Release - Jan. 12, 2012
The Economist - Surgical Robot - The kindness of strangers - Jan. 18, 2012
CNET - Paging Raven II, The Open Source Surgery Robot - Jan. 20, 2012
ACM Communications - Open-Source Surgical Robot Fuels University Research - Jan. 20, 2012

Eight Raven delivered to eight research lab as part of an NSF instrumentation award The sites included:
University of Washington
University of California Santa Cruz
University of California Los Angels
University of California Berkeley
Harvard University
Hopkins University
University of Nebraska Lincoln
Stanford University
Applied Dexterity Inc (ADI) is a startup company that was formed to provide an increasing demand of the Raven system for academic research.
Additional Raven Sites
Surgical Robotics
|
Armada International |
Mechanized Medicine Wired Magazine Jan. 2011 |
Upper Limb Exoskeleton - Stroke
Produce by
Susan L. Young Ph.D.
June 21, 2011 | Length: 00:04:58
Masters Of Innovation: Biological Frontiers
Jan 19, 2011
 |
 |
Raven 2 - A Robo-Surgeon That Does the Work of Two Doctors |
Getting Your Robot On: Wearable Machines’ Intimate Interface
CITRIS Newsletter, August 2009
 |
 |
Turbo Power Physical Therapy July, 2009 |
This is UC Santa Cruz
Featuring Raven - Surgical Robot and the Lower Limb Exoskeleton
Robotics Trends - Medical Robotics Expert Explores the Human-Machine Interface
April 27, 2009
Prototype of exoskeleton arms may help stroke patients -
Science Today at The University of California
March 16, 2009
Baskin Engineering medical robotics expert explores the human-machine interface -
UCSC Press Release
January 13, 2009
Baskin Engineering medical robotics expert explores the human-machine interface -
Story By Tim Stephens (UCSC)
January 13, 2009
UC Santa Cruz engineers build robotic arms to aid physical therapists-
Santa Cruz Sentinel
January 18, 2009
Biongbiong - Robotic exoskeleton for arms
January 13, 2009
MedGadget - Research Into Smart Therapeutic Exoskeleton
January 13, 2009
Top technology of 2008 - Society of Laparoendoscopic Surgeons
January 15, 2008
Dept. of Mechanical and Aerospace Engineering
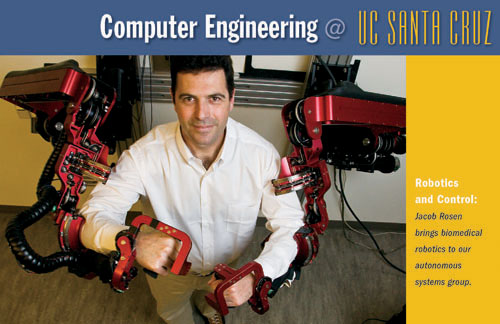
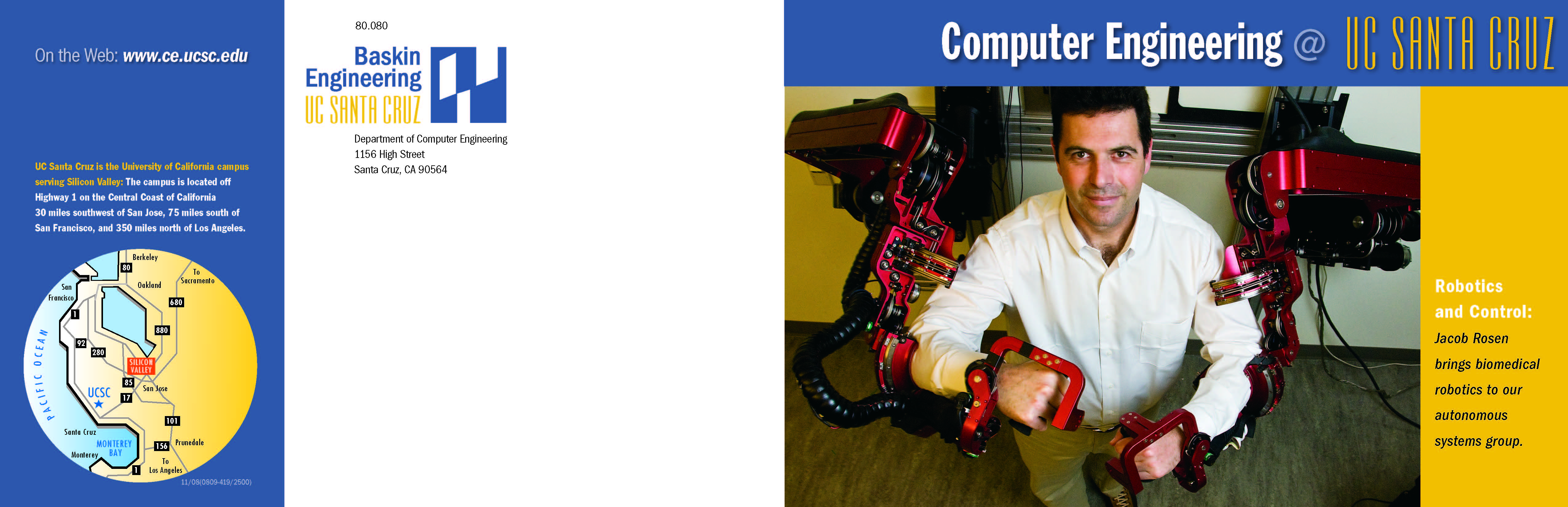
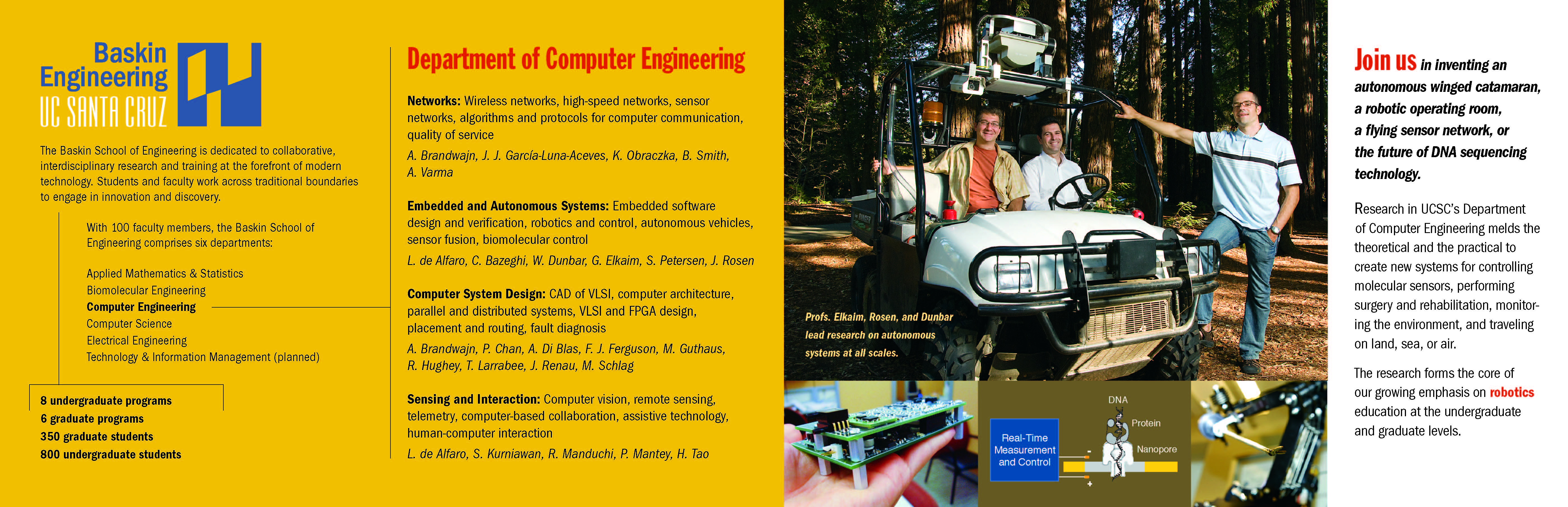
Robotics at UCLA
PDF (Press Quality) | Image Page 1 | Image Page 2

{kind=link}
{kind=link}
Gabriel Elkaim, Jacob Rosen, William Dunbar (from left to right)
The Mission of the University of California
"The distinctive mission of the University is to serve society as a center of higher learning, providing long-term societal benefits through transmitting advanced knowledge, discovering new knowledge, and functioning as an active working repository of organized knowledge. That obligation, more specifically, includes undergraduate education, graduate and professional education, research, and other kinds of public service, which are shaped and bounded by the central pervasive mission of discovering and advancing knowledge."
— From the University of California Academic Plan, 1974-1978