NASA NEEMO 12 Mission -
Mobile Robotic Telesurgery
May 7-18, 2007
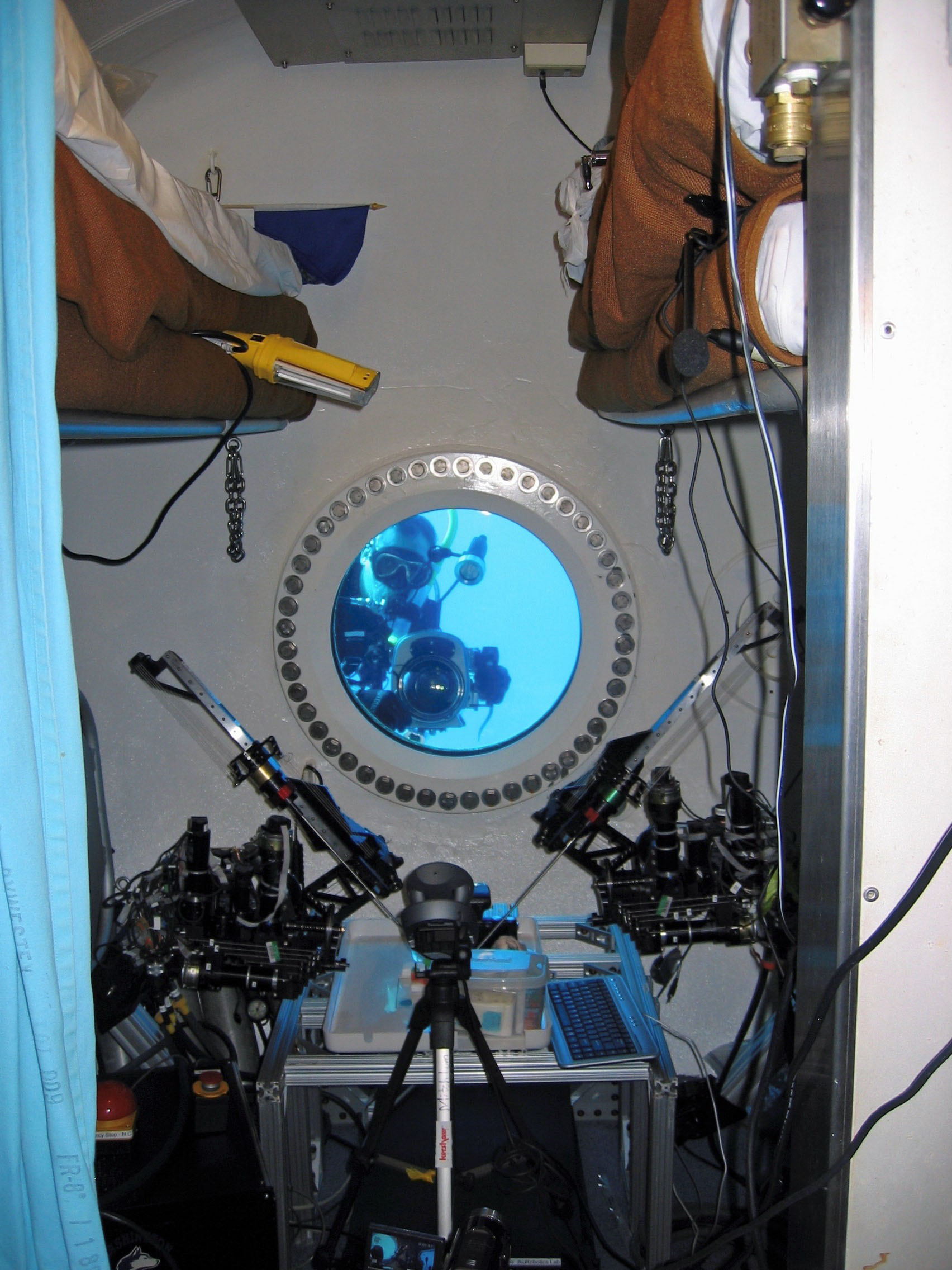
The 12th mission of NASA Extreme Environment Mission Operations (NEEMO) took place in the Aquarius habitat off the coast of Key Largo, Florida. Aquarius is owned by the National Oceanic and Atmospheric Administration (NOAA) and operated by the University of North Carolina Wilmington's National Undersea Research Center (NURC). Aquarius is a 45-foot-long, 9-foot-diameter habitat that rests 62 feet underwater in the Florida Keys National Marine Sanctuary. During NEEMO missions, astronauts and researchers live underwater for many days at a time and conduct valuable research that will help astronauts explore the moon and Mars in the upcoming decades.
The NEEMO 12 crew features two NASA astronauts, a NASA physician, Dr. Tim J. Broderick - a surgeon from the University of Cincinnati, and two NOAA/NURC habitat technicians. These aquanauts lived underwater for 12 days, conducting a variety of advanced medical technology experiments, including robotic telesurgery.
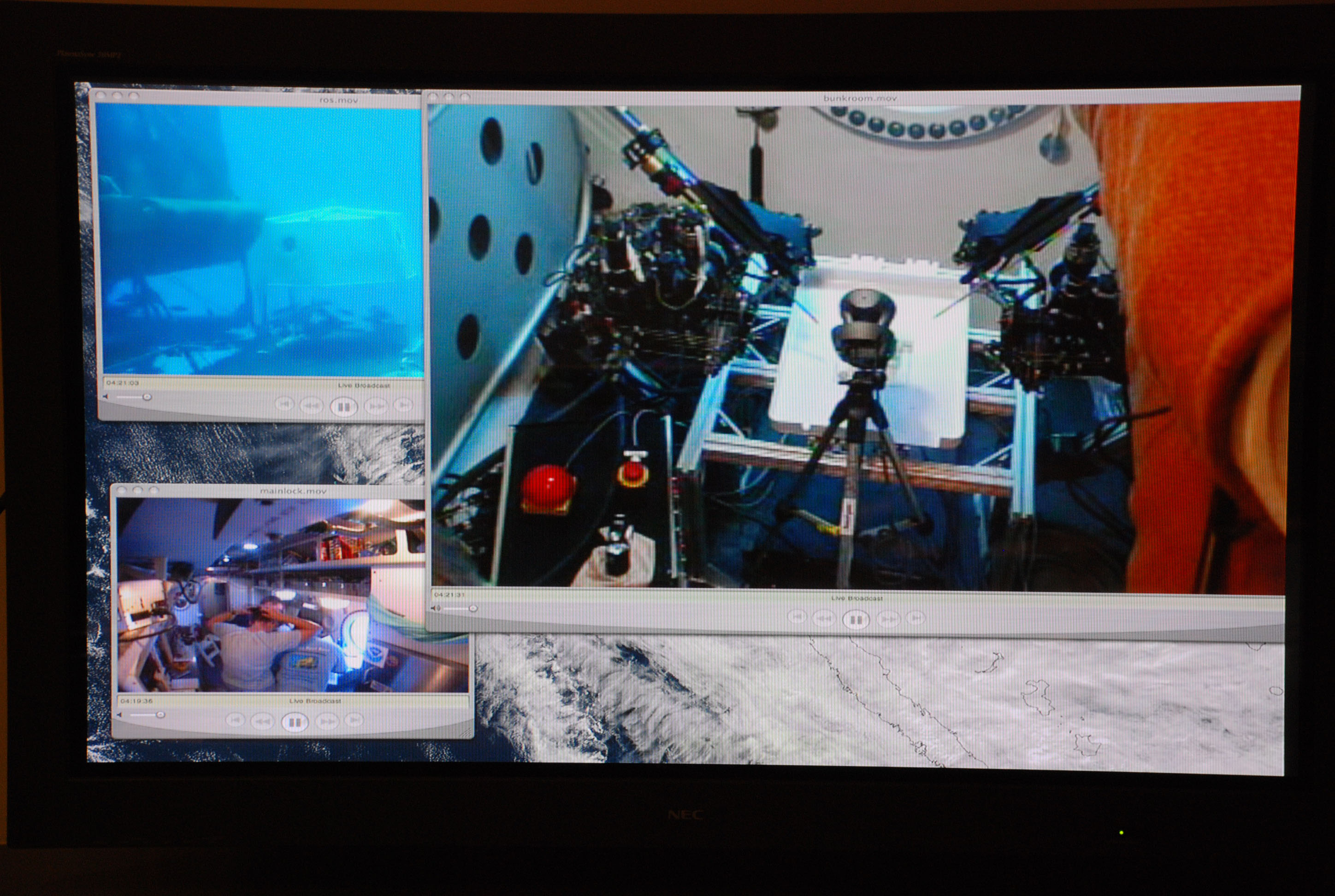
Surgeons at the University of Washington in Seattle teleoperate Raven 1 (remotely controlled surgical robot the system) loacated in Aquarius habitat off the coast of Key Largo, FL form Seattle WA. Telesurgery demonstrations, robotic telesurgery technology developed and refined within this mission will help surgeons overcome interplanetary communication lag time. Technologies
such as surgeon-guided automatic robot function could improve the care of astronauts on future lunar
missions.
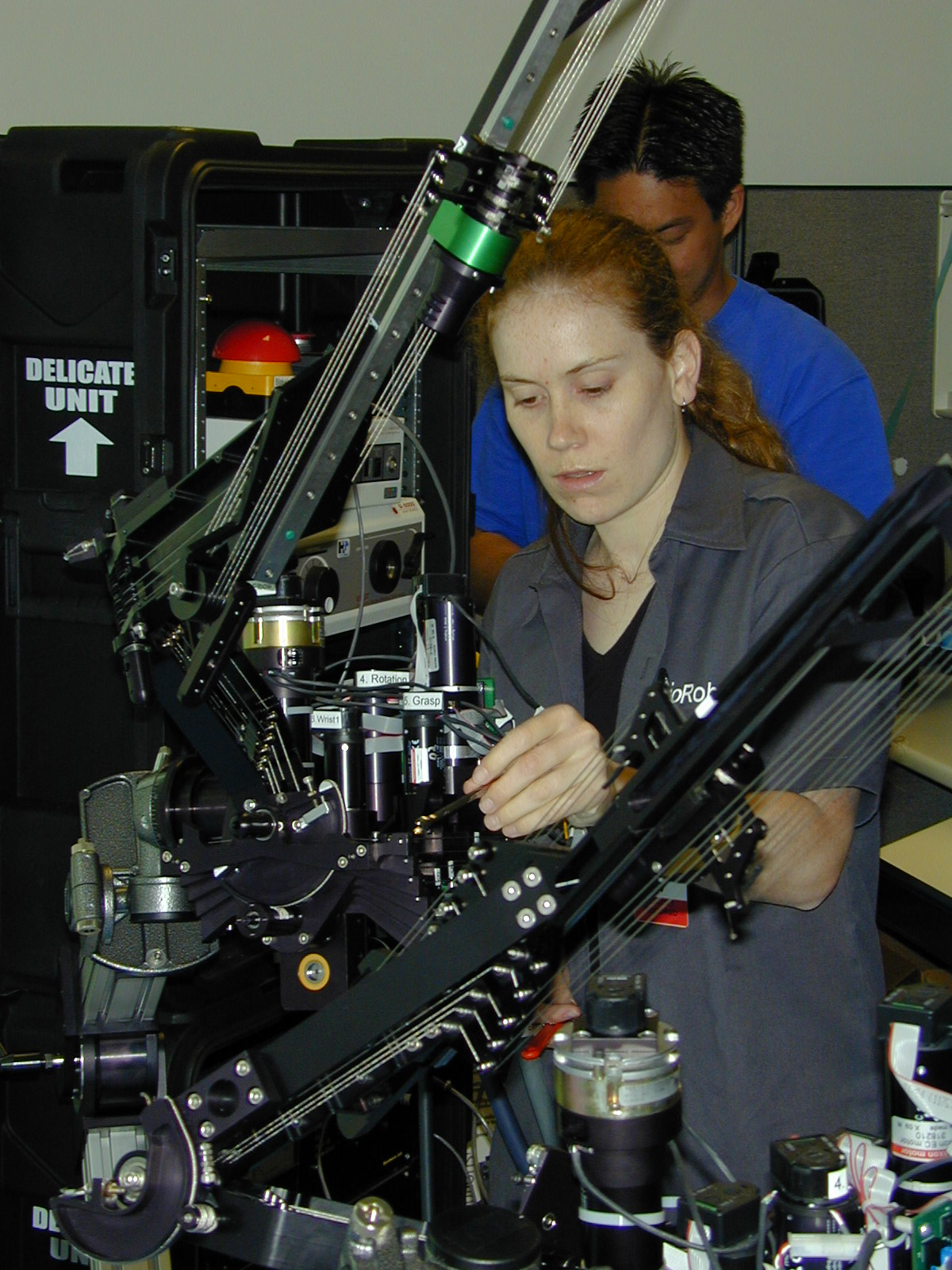
Collaborator / Participants
University of Cincinnati: Dr. Tim J. Broderick, Harnett Brett, Charles Doarn
University of Washington: Blake Hannaford, Jacob Rosen, Mitch Lum,
Diana Freeman, Hawlkeye King
Image Gallery
Field Experiment Setup
 |
|||
People
 |
 |
 |
 |
 |
 |
 |
 |
 |
Device
| Status: Completed |
PUblications
(*) Note: Most of the Bionics Lab publications are available on-line in a PDF format. You may used the publication's reference number as a link to the individual manuscript.
IEEE Spectrum
|
Robot surgeons promise to save lives in remote communities, war zones, and disaster-stricken areas |

[![]() JP19] Harnett Brett, Charles Doarn. , Jacob Rosen, Blake Hannaford, and T. J. Broderick, Evaluation of Unmanned Airborne Vehicles and Mobile Robotic Telesurgery in an Extreme Environment, Vol. 14, No. 6 pp. 534-544, July/August 2008, Telemedicine and e-Health
JP19] Harnett Brett, Charles Doarn. , Jacob Rosen, Blake Hannaford, and T. J. Broderick, Evaluation of Unmanned Airborne Vehicles and Mobile Robotic Telesurgery in an Extreme Environment, Vol. 14, No. 6 pp. 534-544, July/August 2008, Telemedicine and e-Health
[![]() JP21] Mitchell J.H. Lum, Diana C. W. Friedman, , Ganesh Sankaranarayanan, Hawkeye. King, Kenneth Fodero II, Rainer Leuschke, Blake Hannaford, Jacob Rosen, Mika N. Sinanan, The RAVEN - A Multidisciplinary Approach to Developing a Telesurgery System, the International Journal of Robotic Research, Special Issue: Medical Robotics Part I: Vol. 28, No. 9, pp. 1183-1197, 1 September 2009;
JP21] Mitchell J.H. Lum, Diana C. W. Friedman, , Ganesh Sankaranarayanan, Hawkeye. King, Kenneth Fodero II, Rainer Leuschke, Blake Hannaford, Jacob Rosen, Mika N. Sinanan, The RAVEN - A Multidisciplinary Approach to Developing a Telesurgery System, the International Journal of Robotic Research, Special Issue: Medical Robotics Part I: Vol. 28, No. 9, pp. 1183-1197, 1 September 2009;
[![]() JP10] M.J.H. Lum, J. Rosen, M. N. Sinanan, B. Hannaford, Optimization of Spherical Mechanism for a Minimally Invasive Surgical Robot: Theoretical and Experimental Approaches, IEEE Transactions on Biomedical Engineering Vol. 53, No. 7, pp. 1440-1445, July 2006
JP10] M.J.H. Lum, J. Rosen, M. N. Sinanan, B. Hannaford, Optimization of Spherical Mechanism for a Minimally Invasive Surgical Robot: Theoretical and Experimental Approaches, IEEE Transactions on Biomedical Engineering Vol. 53, No. 7, pp. 1440-1445, July 2006
[![]() JP14] Doarn CR, Hufford K, Low T. Rosen J, Hannaford B. Telesurgery and Robotics: A Roundtable Discussion, Telemedicine and E-Health 2007; 13(4):369-380
JP14] Doarn CR, Hufford K, Low T. Rosen J, Hannaford B. Telesurgery and Robotics: A Roundtable Discussion, Telemedicine and E-Health 2007; 13(4):369-380
[![]() CP16]M.J.H. Lum, J. Rosen, M. N. Sinanan, B. Hannaford, Kinematic Optimization of a Spherical Mechanism for a Minimally Invasive Surgical Robot, 2004 IEEE International Conference on Robotics & Automation, pp. 829-834, New-Orleans, USA, April 26-30, 2004
CP16]M.J.H. Lum, J. Rosen, M. N. Sinanan, B. Hannaford, Kinematic Optimization of a Spherical Mechanism for a Minimally Invasive Surgical Robot, 2004 IEEE International Conference on Robotics & Automation, pp. 829-834, New-Orleans, USA, April 26-30, 2004
[![]() CP17]Rosen J., M. Lum, D. Trimble, B. Hannaford, M. Sinanan, Spherical Mechanism Analysis of a Surgical Robot for Minimally Invasive Surgery – Analytical and Experimental Approaches, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, Vol. 111. pp. 422-428, IOS Press, January 2005
CP17]Rosen J., M. Lum, D. Trimble, B. Hannaford, M. Sinanan, Spherical Mechanism Analysis of a Surgical Robot for Minimally Invasive Surgery – Analytical and Experimental Approaches, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, Vol. 111. pp. 422-428, IOS Press, January 2005
[![]() CP20 ]Lum M. J. H., D. Warden, J. Rosen, M. N. Sinanan, and B. Hannaford. Hybrid analysis of a spherical mechanism for a minimally invasive surgical (MIS) robot - design concepts for multiple optimizations. Proceedings of Medicine Meets Virtual Reality, Long Beach, CA, USA, January 2006.
CP20 ]Lum M. J. H., D. Warden, J. Rosen, M. N. Sinanan, and B. Hannaford. Hybrid analysis of a spherical mechanism for a minimally invasive surgical (MIS) robot - design concepts for multiple optimizations. Proceedings of Medicine Meets Virtual Reality, Long Beach, CA, USA, January 2006.
[![]() CP22]Fodero K. II, H. King, M.J.H. Lum, C. Bland, J. Rosen, M. Sinanan, B. Hannaford, Control System Architecture for a Minimally Invasive Surgical Robot Proceedings of Medicine Meets Virtual Reality, Long Beach, CA, USA, January 2006.
CP22]Fodero K. II, H. King, M.J.H. Lum, C. Bland, J. Rosen, M. Sinanan, B. Hannaford, Control System Architecture for a Minimally Invasive Surgical Robot Proceedings of Medicine Meets Virtual Reality, Long Beach, CA, USA, January 2006.
[![]() CP23] Lum M.J.H., D. Trimble, J. Rosen, K. Fodero II, H. King, G. Sankarayanaranan, J. Dosher, R. Leushke, B. Martin-Anderson, M.N. Sinanan, and B. Hannaford. Multidisciplinary approach for developing a new minimally invasive surgical robot system. Proceedings of the 2006 BioRob Conference, Pisa, Italy, February, 2006.
CP23] Lum M.J.H., D. Trimble, J. Rosen, K. Fodero II, H. King, G. Sankarayanaranan, J. Dosher, R. Leushke, B. Martin-Anderson, M.N. Sinanan, and B. Hannaford. Multidisciplinary approach for developing a new minimally invasive surgical robot system. Proceedings of the 2006 BioRob Conference, Pisa, Italy, February, 2006.
[![]() CP28] Lum M.J.H., J. Rosen, H. King, D.C.W. Friedman, G. Donlin, G. Sankaranarayanan, B. Harnett, L. Huffman, C. Doarn, T. Broderick and B. Hannaford, Telesurgery Via Unmanned Aerial Vehicle (UAV) With a Field Deployable Surgical Robot, Proceedings of Medicine Meets Virtual Reality (MMVR 15) pp. 313-315 , Long Beach CA, Feb. 6-9, 2007
CP28] Lum M.J.H., J. Rosen, H. King, D.C.W. Friedman, G. Donlin, G. Sankaranarayanan, B. Harnett, L. Huffman, C. Doarn, T. Broderick and B. Hannaford, Telesurgery Via Unmanned Aerial Vehicle (UAV) With a Field Deployable Surgical Robot, Proceedings of Medicine Meets Virtual Reality (MMVR 15) pp. 313-315 , Long Beach CA, Feb. 6-9, 2007
[![]() CP31] Mitchell Lum, Diana Friedman, Hawkeye King, Regina Donlin, Ganesh Sankaranarayanan, Timothy Broderick, Mika Sinanan, Jacob Rosen and Blake Hannaford, Teleoperation of a Surgical Robot via Airborne Wireless Radio and Transatlantic Internet Links, The 6th International Conference on Field and Service Robotics, July 9-12 2007, Chamonix, France
CP31] Mitchell Lum, Diana Friedman, Hawkeye King, Regina Donlin, Ganesh Sankaranarayanan, Timothy Broderick, Mika Sinanan, Jacob Rosen and Blake Hannaford, Teleoperation of a Surgical Robot via Airborne Wireless Radio and Transatlantic Internet Links, The 6th International Conference on Field and Service Robotics, July 9-12 2007, Chamonix, France
[![]() CP32] G. Sankaranarayanan, B. Hannaford, H. King, S.Y. Ko, M. Lum, D. Friedman, J. Rosen, and B. Hannaford, Portable Surgery Master Station for Mobile Robotic Surgery, Proceedings of the ROBOCOMM, the first International, conference on Robot Communication and Coordination, Athens, Greece, Oct 2007
CP32] G. Sankaranarayanan, B. Hannaford, H. King, S.Y. Ko, M. Lum, D. Friedman, J. Rosen, and B. Hannaford, Portable Surgery Master Station for Mobile Robotic Surgery, Proceedings of the ROBOCOMM, the first International, conference on Robot Communication and Coordination, Athens, Greece, Oct 2007
[![]() CP33] M. J.H. Lum, D. C. W. Friedman, G. Sankaranarayanan, H. King, A. Wright, M. Sinanan, T. Lendvay, J. Rosen, B. Hannaford, Objective Assessment of Telesurgical Robot Systems: Telerobotic FLS, Medicine Meets Virtual Reality (MMVR 16) pp. 263-265, Long Beach CA, Jan. 29 - Feb. 1, 2008
CP33] M. J.H. Lum, D. C. W. Friedman, G. Sankaranarayanan, H. King, A. Wright, M. Sinanan, T. Lendvay, J. Rosen, B. Hannaford, Objective Assessment of Telesurgical Robot Systems: Telerobotic FLS, Medicine Meets Virtual Reality (MMVR 16) pp. 263-265, Long Beach CA, Jan. 29 - Feb. 1, 2008
Multimedia
YouTube
RAVEN Surgical Robot, Overview