Telesurgery Via Unmanned Aerial Vehicle (UAV)
High Altitude Platforms Mobile Robotic Telesurgery (HAPsMRT)
Background
Just as minimally invasive techniques revolutionized the way many surgical interventions are performed, robotically assisted surgery stands to further revolutionize the medical field and provide patients with more effective healthcare. In most robotically assisted cases the surgeon is present in the operating room with the patient. However, all these systems are in effect teleoperating from the surgeon console to the patient. The challenge of surgical teleoperation across long distances was most prominently solved using standard means of telecommunication in a transatlantic experiment. The challenge is now to deploy a surgical robotic system in a mobile setting or extreme environment and to control it through an Unmanned Aerial Vehicle (UAV). This has implications for battlefield trauma and rural or remote telesurgery.
Methods
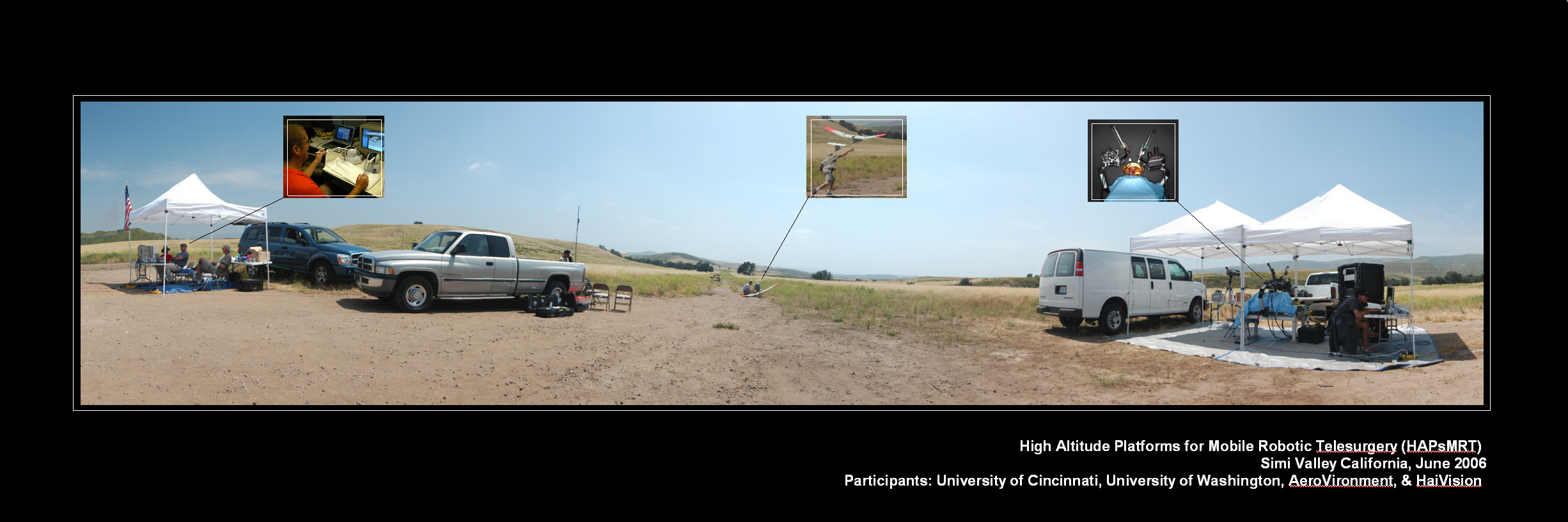
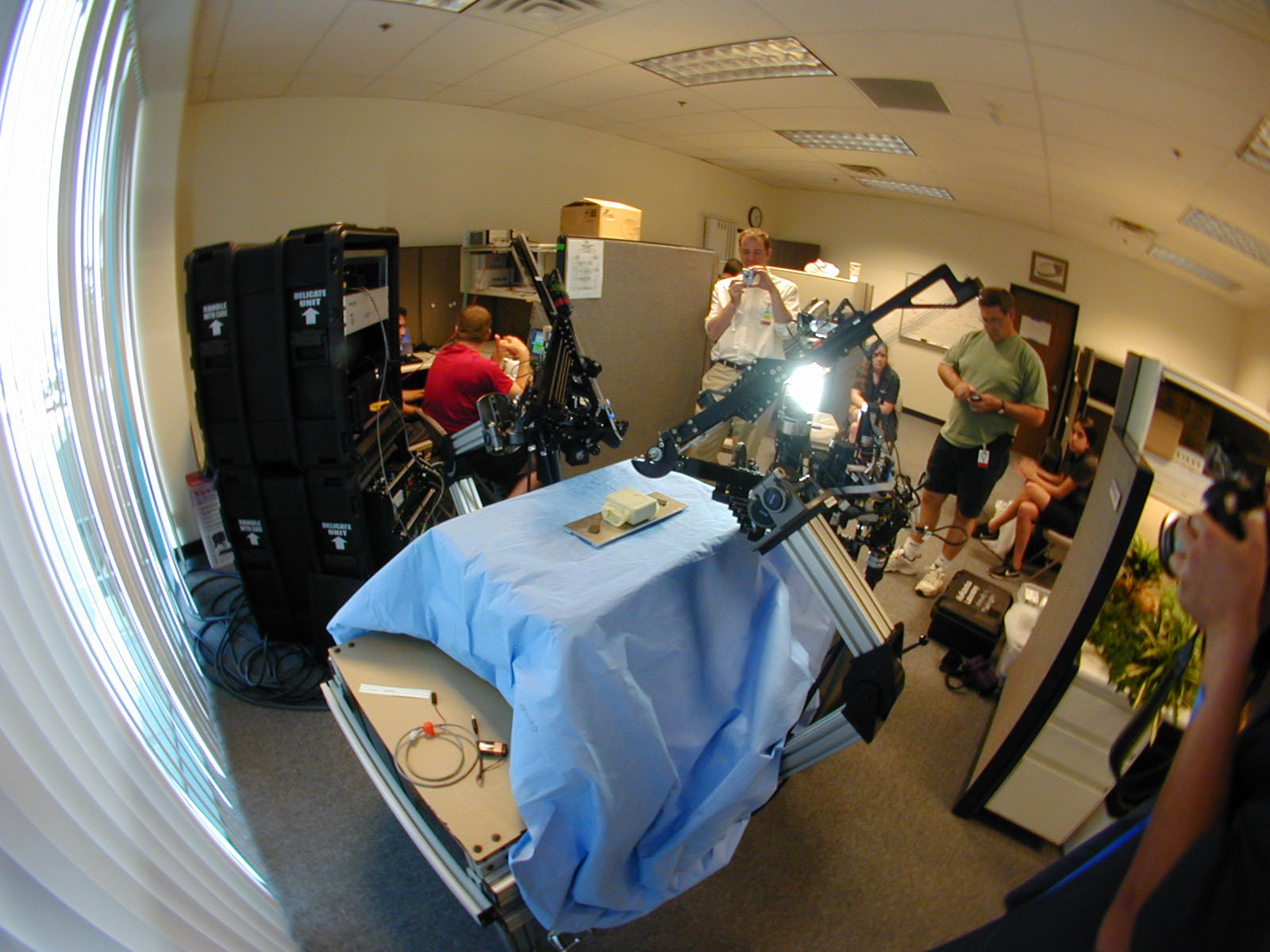
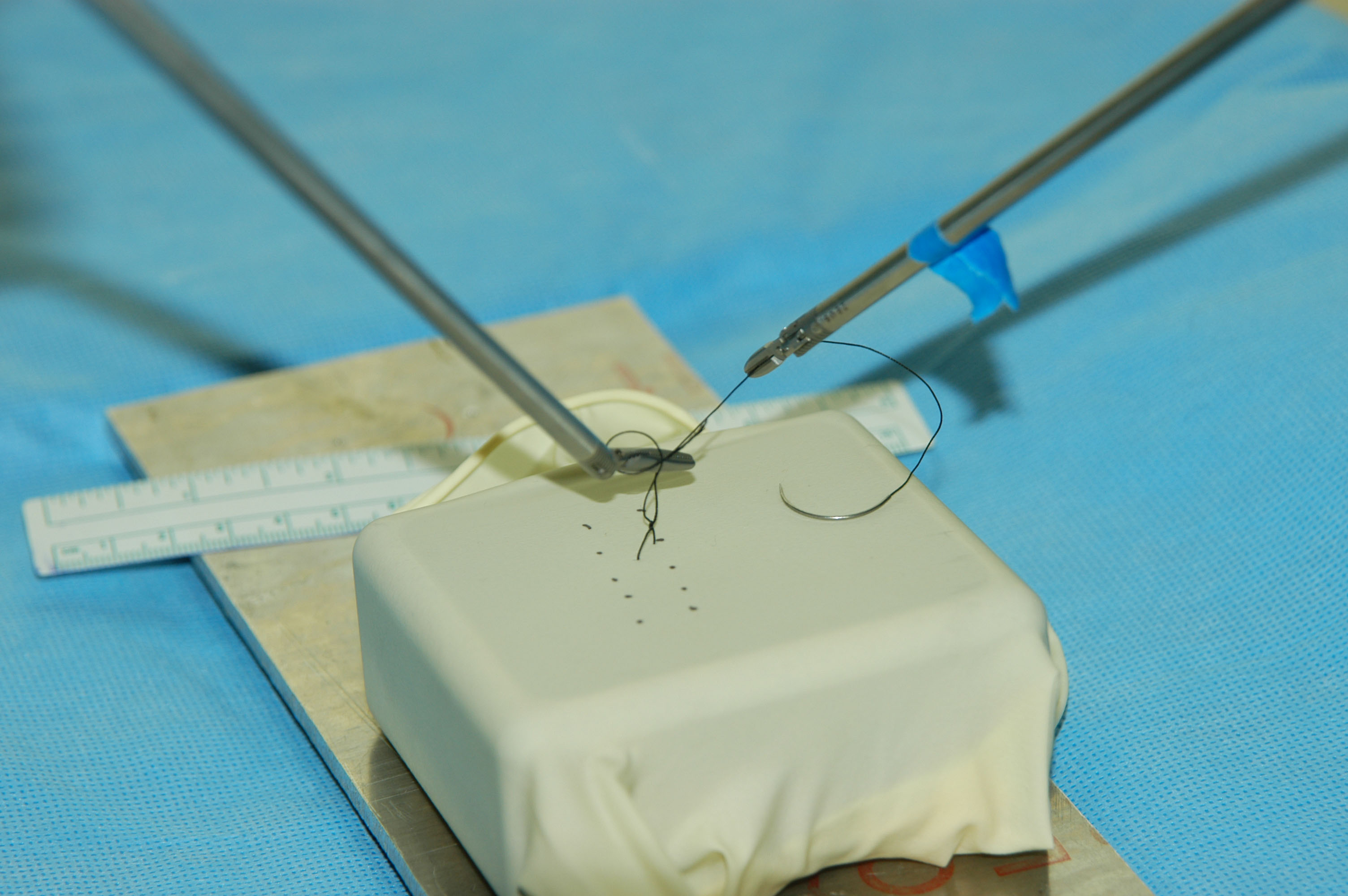
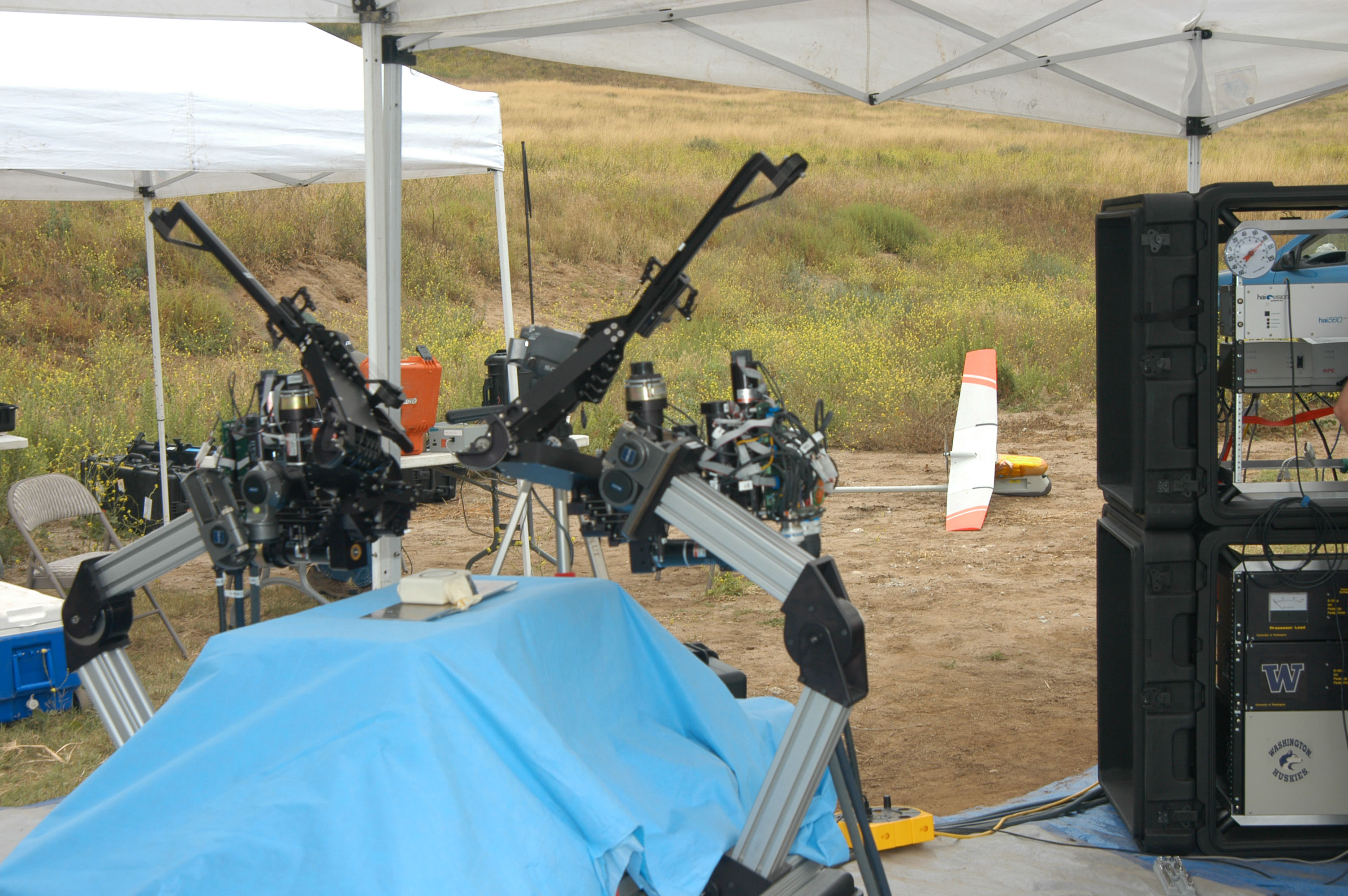
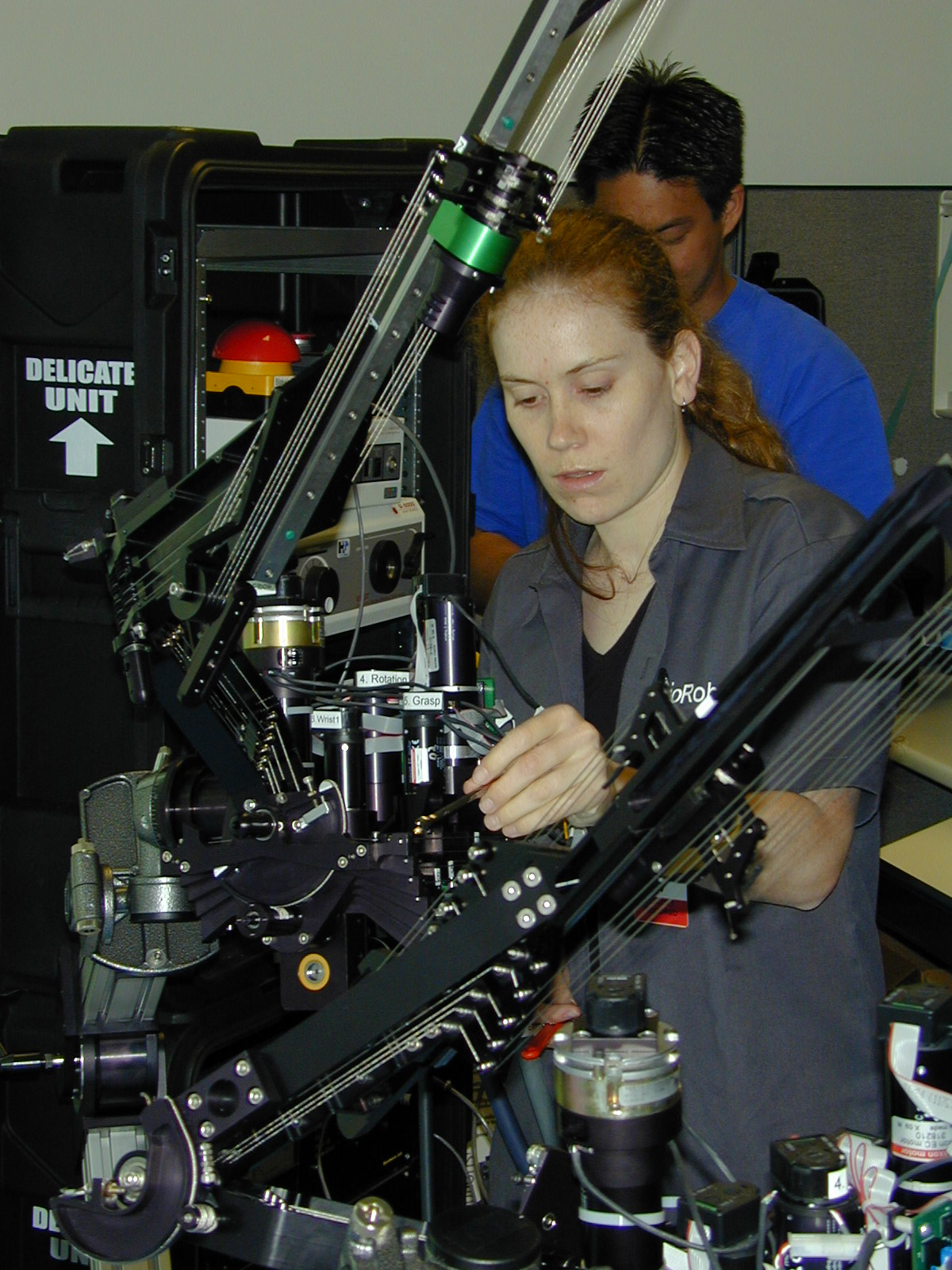
Most research systems never leave an operating room setup or the lab environment in which they were conceived. As a collaborator in the HAPs/MRT (High Altitude Platform/Mobile Robotic Telesurgery) project, Raven - the surgical robot system was deployed in the desert of Simi Valley, CA for telesurgery experiments on an inanimate model. The system was powered by gas generators and was setup under a portable tent in an isolated field. One hundred meters away, two surgeons used the surgical console to interact with inanimate objects simulating internal organs, a modality commonly used in training surgeons. They performed these tasks via a wireless communication link through Aerovironment's PUMA UAV.
Results
The radio link onboard the PUMA provided a TCP/IP Internet-style link between the two sites. The video signal was encoded using MPEG-2 transmitted at 800 kbps by special hardware provided by HaiVision Inc. of Montreal, Canada. The experiment demonstrated telesurgery via wireless communication with limited bandwidth and variable time delays. During three days of field deployment, kinematic data from the surgeons' commands as well as data characterizing the network traffic were collected. This experiment demonstrates the feasibility of performing telesurgery through wireless communication in remote environments.
Conclusions
This was the first experiment in the emerging area of Mobile Robotic Telesurgery (MRT). Potential future MRT experiments include a Surgery at Sea aboard the UW's research vessel, the Thompson. The creation and initial testing of a deployable surgical robot system will facilitate growth in this area and eventually lead to future systems saving human lives on the battlefield and in other remote environments.
Collaborator / Participants
University of Cincinnati: Tim J. Broderick, Harnett Brett, Charles Doarn, Lynn “Chip” Huffman.
University of Washington: Blake Hannaford, Jacob Rosen, Mitch Lum,
Diana Freeman, Hawkeye King, and Gina Donlin;
AeroVironment: Ted Wierzbanowski, Yos Cocquyt, Ed Rios, and Phil Tokumaru;
HaiVision: Peter Maag, Lance Boulet, and Francois Gariepy;
Image Gallery
Field experiments in Simi Valley, CA - Teleoperation in an extreme environment

System
 |
 |
 |
 |
 |
 |
 |
Field Experiment Setup
 |
 |
||
 |
 |
 |
 |
 |
 |
 |
 |
 |
People
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Acknowledgements
This research activity was funded by the U.S. Army TATRC grant
number
W81XWH-05-2-0080.
Device
| Status: Completed |
PUblications
(*) Note: Most of the Bionics Lab publications are available on-line in a PDF format. You may used the publication's reference number as a link to the individual manuscript.
IEEE Spectrum
|
Robot surgeons promise to save lives in remote communities, war zones, and disaster-stricken areas |

[![]() JP19] Harnett Brett, Charles Doarn. , Jacob Rosen, Blake Hannaford, and T. J. Broderick, Evaluation of Unmanned Airborne Vehicles and Mobile Robotic Telesurgery in an Extreme Environment, Vol. 14, No. 6 pp. 534-544, July/August 2008, Telemedicine and e-Health
JP19] Harnett Brett, Charles Doarn. , Jacob Rosen, Blake Hannaford, and T. J. Broderick, Evaluation of Unmanned Airborne Vehicles and Mobile Robotic Telesurgery in an Extreme Environment, Vol. 14, No. 6 pp. 534-544, July/August 2008, Telemedicine and e-Health
[![]() JP21] Mitchell J.H. Lum, Diana C. W. Friedman, , Ganesh Sankaranarayanan, Hawkeye. King, Kenneth Fodero II, Rainer Leuschke, Blake Hannaford, Jacob Rosen, Mika N. Sinanan, The RAVEN - A Multidisciplinary Approach to Developing a Telesurgery System, the International Journal of Robotic Research, Special Issue: Medical Robotics Part I: Vol. 28, No. 9, pp. 1183-1197, 1 September 2009;
JP21] Mitchell J.H. Lum, Diana C. W. Friedman, , Ganesh Sankaranarayanan, Hawkeye. King, Kenneth Fodero II, Rainer Leuschke, Blake Hannaford, Jacob Rosen, Mika N. Sinanan, The RAVEN - A Multidisciplinary Approach to Developing a Telesurgery System, the International Journal of Robotic Research, Special Issue: Medical Robotics Part I: Vol. 28, No. 9, pp. 1183-1197, 1 September 2009;
[![]() JP10] M.J.H. Lum, J. Rosen, M. N. Sinanan, B. Hannaford, Optimization of Spherical Mechanism for a Minimally Invasive Surgical Robot: Theoretical and Experimental Approaches, IEEE Transactions on Biomedical Engineering Vol. 53, No. 7, pp. 1440-1445, July 2006
JP10] M.J.H. Lum, J. Rosen, M. N. Sinanan, B. Hannaford, Optimization of Spherical Mechanism for a Minimally Invasive Surgical Robot: Theoretical and Experimental Approaches, IEEE Transactions on Biomedical Engineering Vol. 53, No. 7, pp. 1440-1445, July 2006
[![]() JP14] Doarn CR, Hufford K, Low T. Rosen J, Hannaford B. Telesurgery and Robotics: A Roundtable Discussion, Telemedicine and E-Health 2007; 13(4):369-380
JP14] Doarn CR, Hufford K, Low T. Rosen J, Hannaford B. Telesurgery and Robotics: A Roundtable Discussion, Telemedicine and E-Health 2007; 13(4):369-380
[![]() CP16]M.J.H. Lum, J. Rosen, M. N. Sinanan, B. Hannaford, Kinematic Optimization of a Spherical Mechanism for a Minimally Invasive Surgical Robot, 2004 IEEE International Conference on Robotics & Automation, pp. 829-834, New-Orleans, USA, April 26-30, 2004
CP16]M.J.H. Lum, J. Rosen, M. N. Sinanan, B. Hannaford, Kinematic Optimization of a Spherical Mechanism for a Minimally Invasive Surgical Robot, 2004 IEEE International Conference on Robotics & Automation, pp. 829-834, New-Orleans, USA, April 26-30, 2004
[![]() CP17]Rosen J., M. Lum, D. Trimble, B. Hannaford, M. Sinanan, Spherical Mechanism Analysis of a Surgical Robot for Minimally Invasive Surgery – Analytical and Experimental Approaches, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, Vol. 111. pp. 422-428, IOS Press, January 2005
CP17]Rosen J., M. Lum, D. Trimble, B. Hannaford, M. Sinanan, Spherical Mechanism Analysis of a Surgical Robot for Minimally Invasive Surgery – Analytical and Experimental Approaches, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, Vol. 111. pp. 422-428, IOS Press, January 2005
[![]() CP20 ]Lum M. J. H., D. Warden, J. Rosen, M. N. Sinanan, and B. Hannaford. Hybrid analysis of a spherical mechanism for a minimally invasive surgical (MIS) robot - design concepts for multiple optimizations. Proceedings of Medicine Meets Virtual Reality, Long Beach, CA, USA, January 2006.
CP20 ]Lum M. J. H., D. Warden, J. Rosen, M. N. Sinanan, and B. Hannaford. Hybrid analysis of a spherical mechanism for a minimally invasive surgical (MIS) robot - design concepts for multiple optimizations. Proceedings of Medicine Meets Virtual Reality, Long Beach, CA, USA, January 2006.
[![]() CP22]Fodero K. II, H. King, M.J.H. Lum, C. Bland, J. Rosen, M. Sinanan, B. Hannaford, Control System Architecture for a Minimally Invasive Surgical Robot Proceedings of Medicine Meets Virtual Reality, Long Beach, CA, USA, January 2006.
CP22]Fodero K. II, H. King, M.J.H. Lum, C. Bland, J. Rosen, M. Sinanan, B. Hannaford, Control System Architecture for a Minimally Invasive Surgical Robot Proceedings of Medicine Meets Virtual Reality, Long Beach, CA, USA, January 2006.
[![]() CP23] Lum M.J.H., D. Trimble, J. Rosen, K. Fodero II, H. King, G. Sankarayanaranan, J. Dosher, R. Leushke, B. Martin-Anderson, M.N. Sinanan, and B. Hannaford. Multidisciplinary approach for developing a new minimally invasive surgical robot system. Proceedings of the 2006 BioRob Conference, Pisa, Italy, February, 2006.
CP23] Lum M.J.H., D. Trimble, J. Rosen, K. Fodero II, H. King, G. Sankarayanaranan, J. Dosher, R. Leushke, B. Martin-Anderson, M.N. Sinanan, and B. Hannaford. Multidisciplinary approach for developing a new minimally invasive surgical robot system. Proceedings of the 2006 BioRob Conference, Pisa, Italy, February, 2006.
[![]() CP28] Lum M.J.H., J. Rosen, H. King, D.C.W. Friedman, G. Donlin, G. Sankaranarayanan, B. Harnett, L. Huffman, C. Doarn, T. Broderick and B. Hannaford, Telesurgery Via Unmanned Aerial Vehicle (UAV) With a Field Deployable Surgical Robot, Proceedings of Medicine Meets Virtual Reality (MMVR 15) pp. 313-315 , Long Beach CA, Feb. 6-9, 2007
CP28] Lum M.J.H., J. Rosen, H. King, D.C.W. Friedman, G. Donlin, G. Sankaranarayanan, B. Harnett, L. Huffman, C. Doarn, T. Broderick and B. Hannaford, Telesurgery Via Unmanned Aerial Vehicle (UAV) With a Field Deployable Surgical Robot, Proceedings of Medicine Meets Virtual Reality (MMVR 15) pp. 313-315 , Long Beach CA, Feb. 6-9, 2007
[![]() CP31] Mitchell Lum, Diana Friedman, Hawkeye King, Regina Donlin, Ganesh Sankaranarayanan, Timothy Broderick, Mika Sinanan, Jacob Rosen and Blake Hannaford, Teleoperation of a Surgical Robot via Airborne Wireless Radio and Transatlantic Internet Links, The 6th International Conference on Field and Service Robotics, July 9-12 2007, Chamonix, France
CP31] Mitchell Lum, Diana Friedman, Hawkeye King, Regina Donlin, Ganesh Sankaranarayanan, Timothy Broderick, Mika Sinanan, Jacob Rosen and Blake Hannaford, Teleoperation of a Surgical Robot via Airborne Wireless Radio and Transatlantic Internet Links, The 6th International Conference on Field and Service Robotics, July 9-12 2007, Chamonix, France
[![]() CP32] G. Sankaranarayanan, B. Hannaford, H. King, S.Y. Ko, M. Lum, D. Friedman, J. Rosen, and B. Hannaford, Portable Surgery Master Station for Mobile Robotic Surgery, Proceedings of the ROBOCOMM, the first International, conference on Robot Communication and Coordination, Athens, Greece, Oct 2007
CP32] G. Sankaranarayanan, B. Hannaford, H. King, S.Y. Ko, M. Lum, D. Friedman, J. Rosen, and B. Hannaford, Portable Surgery Master Station for Mobile Robotic Surgery, Proceedings of the ROBOCOMM, the first International, conference on Robot Communication and Coordination, Athens, Greece, Oct 2007
[![]() CP33] M. J.H. Lum, D. C. W. Friedman, G. Sankaranarayanan, H. King, A. Wright, M. Sinanan, T. Lendvay, J. Rosen, B. Hannaford, Objective Assessment of Telesurgical Robot Systems: Telerobotic FLS, Medicine Meets Virtual Reality (MMVR 16) pp. 263-265, Long Beach CA, Jan. 29 - Feb. 1, 2008
CP33] M. J.H. Lum, D. C. W. Friedman, G. Sankaranarayanan, H. King, A. Wright, M. Sinanan, T. Lendvay, J. Rosen, B. Hannaford, Objective Assessment of Telesurgical Robot Systems: Telerobotic FLS, Medicine Meets Virtual Reality (MMVR 16) pp. 263-265, Long Beach CA, Jan. 29 - Feb. 1, 2008
Multimedia
YouTube
RAVEN Surgical Robot, Overview