Raven IV - Colaborative Surgery
Colaborator: Daniel Glozman
Surgery is traditionally conducted as a collaborative effort including a prime surgeon, an assistant along with scrub and circulation nurses. The introduction of surgical robotics into the operating room (OR) change the dynamics and the type of interaction that was perfected over decades. For the clinically approved surgical robotic systems the surgeon is still in the OR but he or she is physically removed from the patient. Using a surgical consoles the surgeon may teleoperate up to three tools and a camera are. The assistant may use another surgical console or physically interact with the robot by replacing tools or interacting with tissues using manually operated tools.
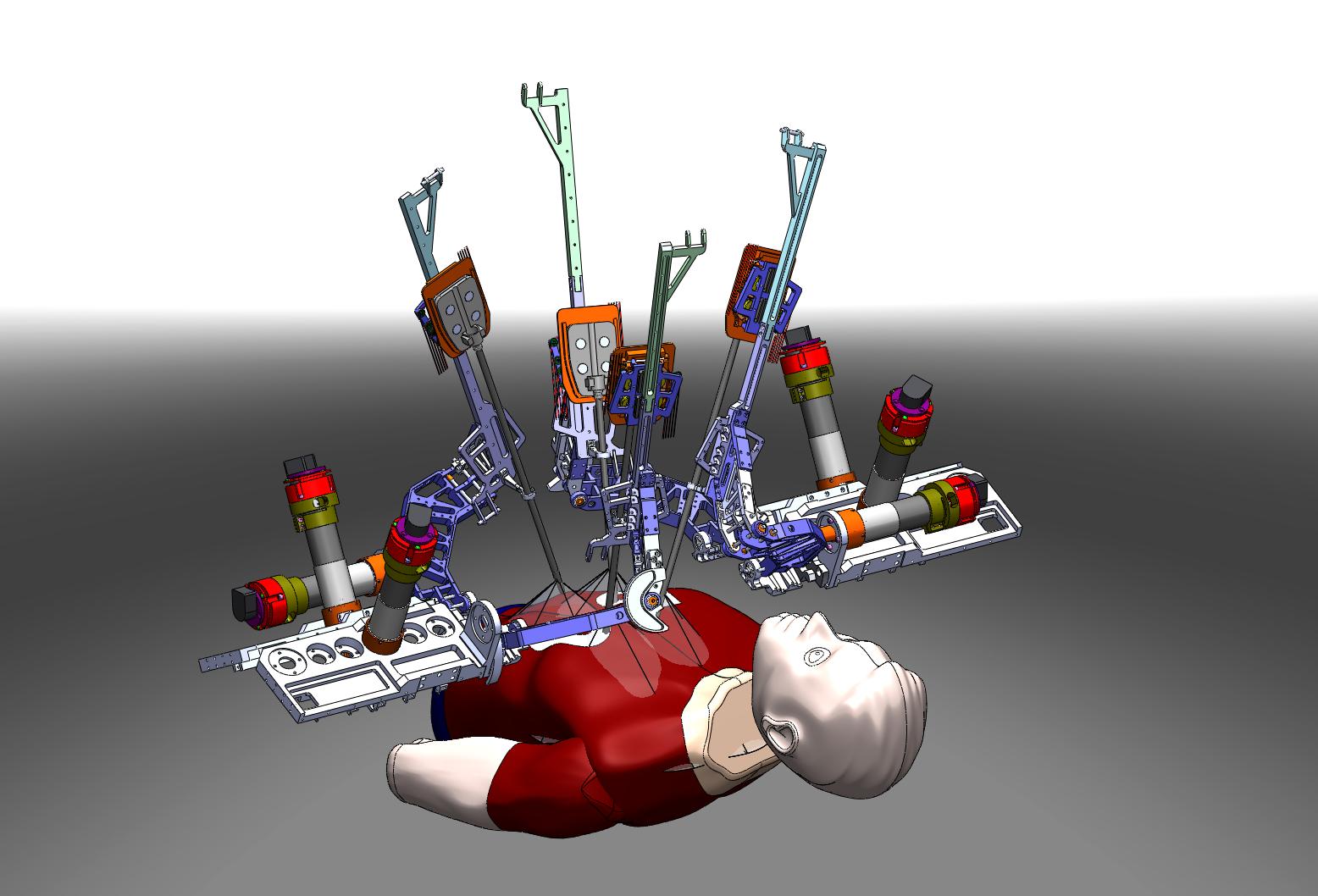
In order to reproduce the originally dynamics of two surgeons interacting with the surgical site using a robotic system, four dexterous arms accounted for the four arms of the two surgeons along with two pairs of eyes are needed. Raven IV is a surgical robotics system that was developed at the University of California – Santa Cruz which includes four robotics arms and 2 cameras. The system facilitates a collaborative effort of two surgeons interacting with the surgical site in teleportation. Each surgical arms is based on a spherical mechanisms with a remote center located at the point of entry of the tool into the human body. A detailed optimization of the surgical robotics arms was conducted to minimize the footprint of the system in the operational field while maximizing the manipulability of the arms in their shared workspace. The system architecture allows two surgeons in two remote locations to connect via commercially available internet connection using a UDP protocol using a unique software client interface and teleoperate the surgical robots in a master/slave configuration. Initial teleoperation experiments conducted within the continental US from several remote locations allowed two surgeons, each one controlling a set of two arms, to complete fundamental laparoscopic surgery (FLS) tasks collaboratively while using sampling rate of 1 kHz.
Collaborative surgery will continue to be the preferred modus operatndi in surgery and Raven IV demonstrated its capability to support this mode using a surgical robotic system.
Photo Gallery & Multimedia
 |
 |
 |
 |
 |
 |
Dr. Mika Sinanan (UW - Dept. of Surgery) and Dr.Thomas Lendvay (UW & Childrens’ Hospital - Pediatric Urology) collaboratively teleoperating Raven IV located at the Bionicas Lab at UCSC (Santa Cruz, CA) from the UW in Seattle WA.
Projects
RAVEN Surgical Robot System Participation in NASA NEEMO 12
Device: Raven - Surgical Robot - Custom design
Methodology:Inanimate objects simulating internal organs
Status: Completed
Telesurgery Via Unmanned Aerial Vehicle (UAV)
High Altitude Platforms Mobile Robotic Telesurgery (HAPsMRT)
Device: Raven - Surgical Robot - Custom design
Methodology:Inanimate objects simulating internal organs
Status: Completed
Objective Assessment of Telesurgical Robot Systems: Telerobotic FLS
Device: Raven - Surgical Robot - Custom design
Methodology:Inanimate objects simulating internal organs (FLS)
Status: Completed
PUblications
(*) Note: Most of the Bionics Lab publications are available on-line in a PDF format. You may used the publication's reference number as a link to the individual manuscript.
IEEE Spectrum
|
Robot surgeons promise to save lives in remote communities, war zones, and disaster-stricken areas |

M.J.H. Lum, J. Rosen, M. N. Sinanan, B. Hannaford, Optimization of Spherical Mechanism for a Minimally Invasive Surgical Robot: Theoretical and Experimental Approaches, IEEE Transactions on Biomedical Engineering Vol. 53, No. 7, pp. 1440-1445, July 2006 [![]() JP10]
JP10]
Doarn CR, Hufford K, Low T. Rosen J, Hannaford B. Telesurgery and Robotics: A Roundtable Discussion, Telemedicine and E-Health 2007; 13(4):369-380 [![]() JP14]
JP14]
M.J.H. Lum, J. Rosen, M. N. Sinanan, B. Hannaford, Kinematic Optimization of a Spherical Mechanism for a Minimally Invasive Surgical Robot, 2004 IEEE International Conference on Robotics & Automation, pp. 829-834, New-Orleans, USA, April 26-30, 2004 [![]() CP16]
CP16]
Rosen J., M. Lum, D. Trimble, B. Hannaford, M. Sinanan, Spherical Mechanism Analysis of a Surgical Robot for Minimally Invasive Surgery – Analytical and Experimental Approaches, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, Vol. 111. pp. 422-428, IOS Press, January 2005 [![]() CP17]
CP17]
Lum M. J. H., D. Warden, J. Rosen, M. N. Sinanan, and B. Hannaford. Hybrid analysis of a spherical mechanism for a minimally invasive surgical (MIS) robot - design concepts for multiple optimizations. Proceedings of Medicine Meets Virtual Reality, Long Beach, CA, USA, January 2006. [![]() CP20 ]
CP20 ]
Fodero K. II, H. King, M.J.H. Lum, C. Bland, J. Rosen, M. Sinanan, B. Hannaford, Control System Architecture for a Minimally Invasive Surgical Robot Proceedings of Medicine Meets Virtual Reality, Long Beach, CA, USA, January 2006. [![]() CP22]
CP22]
Lum M.J.H., D. Trimble, J. Rosen, K. Fodero II, H. King, G. Sankarayanaranan, J. Dosher, R. Leushke, B. Martin-Anderson, M.N. Sinanan, and B. Hannaford. Multidisciplinary approach for developing a new minimally invasive surgical robot system. Proceedings of the 2006 BioRob Conference, Pisa, Italy, February, 2006. [![]() CP23]
CP23]
Lum M.J.H., J. Rosen, H. King, D.C.W. Friedman, G. Donlin, G. Sankaranarayanan, B. Harnett, L. Huffman, C. Doarn, T. Broderick and B. Hannaford, Telesurgery Via Unmanned Aerial Vehicle (UAV) With a Field Deployable Surgical Robot, Proceedings of Medicine Meets Virtual Reality (MMVR 15) pp. 313-315 , Long Beach CA, Feb. 6-9, 2007 [![]() CP28]
CP28]
Mitchell Lum, Diana Friedman, Hawkeye King, Regina Donlin, Ganesh Sankaranarayanan, Timothy Broderick, Mika Sinanan, Jacob Rosen and Blake Hannaford, Teleoperation of a Surgical Robot via Airborne Wireless Radio and Transatlantic Internet Links, The 6th International Conference on Field and Service Robotics, July 9-12 2007, Chamonix, France [![]() CP31]
CP31]
G. Sankaranarayanan, B. Hannaford, H. King, S.Y. Ko, M. Lum, D. Friedman, J. Rosen, and B. Hannaford, Portable Surgery Master Station for Mobile Robotic Surgery, Proceedings of the ROBOCOMM, the first International, conference on Robot Communication and Coordination, Athens, Greece, Oct 2007 [![]() CP32]
CP32]
M. J.H. Lum, D. C. W. Friedman, G. Sankaranarayanan, H. King, A. Wright, M. Sinanan, T. Lendvay, J. Rosen, B. Hannaford, Objective Assessment of Telesurgical Robot Systems: Telerobotic FLS, Medicine Meets Virtual Reality (MMVR 16) pp. 263-265, Long Beach CA, Jan. 29 - Feb. 1, 2008 [![]() CP33]
CP33]