Blue Dragon
The BlueDRAGON is a system for acquiring the kinematics and the dynamics of two endoscopic tools along with the visual view of the surgical scene. The system includes two four-bar passive mechanisms attached to endoscopic tools. The four bar mechanisms translate the tool's rotation around the pivot point located in the port into the mechanism's joints incorporating position sensors. These translation is enabled when the base axes and the tool's shaft axis intersect the port's pivot point. Moreover, the mechanism's axes alignment prevented any additional moments applied on the skin and internal tissues except the ones that are generated intentionally by using the tools. The gravitational forces applied on the surgeon's hand when the mechanism is away from its neutral position are compensated by an optimized spring connecting the bases and the first two coupled links.
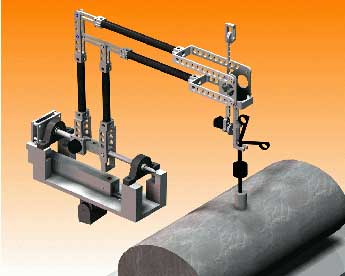
CAD drawing of the BlueDRAGON mechanism
The two mechanisms are equipped with three classes of sensors: (i) position sensors (multi turn potentiometers - Midori America Corp.) are incorporated into four of the mechanisms' joints for measuring the positions, the orientations and the translation of the two instrumented endoscopic tools attached to them. In addition, two linear potentiometer (Penny & Giles Controls Ltd.) that are attached to the tools' handle are used for measuring the endoscopic handle and tool tip angles; (ii) three-axis force/torque (F/T) sensors (ATI-Mini sensor) are located at the proximal end of the endoscopic tools' shaft, as well as force sensors inserted into the tools' handles for measuring the grasping forces at the hand/tool interface and (iii) contact sensors providing binary indication of any tool/tissue contact. Data measured by the BlueDRAGONs' sensors are acquired using two 12-bit National Instruments USB A/D cards sampling the 26 channels (3 rotations, 2 translations, 1 tissue contact, and 7 channels of forces and torques from each instrumented grasper) at 30 Hz. In addition to the data acquisition, the synchronized view of the surgical scene is incorporated into a graphical user interface displaying the data in real-time.

The BlueDRAGON system integration into a minimally invasive surgery setup
Projects
Device: BlueDRAGON (Two instrumented tools)
Methodology: In Vivo measurements - Animal Model (Pig), Markov Model
Number of Subjects: 30 Human
Model: Markov model - 28 states
Status: Completed
Markov Models of MIS based on Force/Torque Signatures and Tool/Tissue Interactions
Device: IEG (One Instrumented tool - Dominant Hand)
Methodology: In Vivo measurements - Animal Model (Pig), Markov Model
Number of Subjects: 10 Human (5 - R1 and 5 - Expert)
Model: Markov model - 3 states
Status: Completed
Device: IEG (One Instrumented tool - Dominant Hand)
Methodology: In Vivo measurements - Animal Model (Pig), Markov Model
Number of Subjects: 8 Human (2x R1, R3, R5, and Expert)
Model: Hidden Markov model - 14 states
Status: Complete
PUblications
(*) Note: Most of the Bionics Lab publications are available on-line in a PDF format. You may used the publication's reference number as a link to the individual manuscript.
Rosen J., J. D. Brown, L. Chang, M. Sinanan B. Hannaford, Generalized Approach for Modeling Minimally Invasive Surgery as a Stochastic Process Using a Discrete Markov Model, IEEE Transactions on Biomedical Engineering Vol. 53, No. 3, March 2006, pp. 399 - 413 [![]() JP9]
JP9]
Richards C., J. Rosen, B. Hannaford, M. MacFarlane, C. Pellegrini, M. Sinanan, Skills Evaluation in Minimally Invasive Surgery Using Force/Torque Signatures, Surgical Endoscopy, Vol 14, No. 9, pp. 791-798. [![]() JP4]
JP4]
Rosen J., B. Hannaford, Richards C., M. Sinanan, Markov Modeling of Minimally Invasive Surgery Based on Tool/Tissue interaction and Force/Torque Signatures for Evaluating Surgical Skills, IEEE Transactions on Biomedical Engineering Vol. 48. No. 5, pp. 579-591 May 2001. [![]() JP5]
JP5]
Rosen J., M. Solazzo, B. Hannaford, M. Sinanan, Objective Evaluation of Laparoscopic Skills Based on Haptic Information and Tool/Tissue Interactions, Computer Aided Surgery, Volume 7, Issue 1, pp. 49-61 July 2002 [![]() JP7].
JP7].
Hannaford B., J. Trujillo, M. Sinanan, M. Moreyra, J. Rosen, J. Brown, R. Lueschke, M. MacFarlane, Computerized Endoscopic Surgical Grasper, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, Vol. 50, pp. 265-271, IOS Press, January 1998.[![]() CP2]
CP2]
Rosen J., M. MacFarlane, C. Richards, B. Hannaford, C. Pellegrini, M. Sinanan, Surgeon/Endoscopic Tool Force-Torque Signatures In The Evaluation of Surgical Skills During Minimally Invasive Surgery, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, Vol. 62, pp. 290-296, IOS Press, January 1999. [![]() CP3]
CP3]
Rosen J., C. Richards, B. Hannaford, M. Sinanan, Hidden Markov Models of Minimally Invasive Surgery, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, Vol. 70 pp. 279-285, IOS Press, January 2000. [![]() CP4]
CP4]
Rosen J., M. Solazzo, B. Hannaford, M. Sinanan , Objective Evaluation of Laparoscopic Surgical Skills Using Hidden Markov Models Based on Haptic Information and Tool/Tissue Interactions, American College of Surgeons Annual Meeting - Washington State Chapter, Lake Chelan, June 2000. [![]() CP5]
CP5]
Rosen J., M. Solazzo, B. Hannaford, M. Sinanan, Objective Laparoscopic Skills Assessments of Surgical Residents Using Hidden Markov Models Based on Haptic Information and Tool/Tissue Interactions, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, Vol. 81, pp.417-423, IOS Press, January 2001. [![]() CP7]
CP7]
Rosen J., J. D. Brown, M. Barreca, L. Chang, B. Hannaford, M. Sinanan, The Blue DRAGON - A System for Monitoring the Kinematics and the Dynamics of Endoscopic Tools in Minimally Invasive Surgery for Objective Laparoscopic Skill Assessment, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, Vol. 85, pp.412-418, IOS Press, January 2002. [![]() CP8]
CP8]
Rosen J., J. D. Brown, L. Chang, M. Barreca, M. Sinanan, B. Hannaford, The Blue DRAGON - A System for Measuring the Kinematics and the Dynamics of Minimally Invasive Surgical Tools In–Vivo, Proceedings of the 2002 IEEE International Conference on Robotics & Automation, Washington DC, USA, May 11-15, 2002. [![]() CP10]
CP10]
Rosen J., L. Chang, J. D. Brown, B. Hannaford, M. Sinanan, R. Satava, Minimally Invasive Surgery Task Decomposition - Etymology of Endoscopic Suturing, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, vol. 94, pp. 295-301, IOS Press, January 2003 [![]() CP11].
CP11].
Kowalewski T.M., J. Rosen, L. Chang, M. Sinanan, B. Hannaford, Optimization of a Vector Quantization Codebook for Objective Evaluation of Surgical Skill, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, vol. 98, pp. 174-179, IOS Press, January 2004 [![]() CP14].
CP14].
Brown J. D., J. Rosen, L. Chang, M. Sinanan, B. Hannaford, Quantifying Surgeon Grasping Mechanics in Laparoscopy Using the Blue DRAGON System, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, vol. 98, pp. 34-36, IOS Press, January 2004 [![]() CP15]
CP15]
Multimedia
The BlueDRAGON system integration into a minimally invasive surgery setup -Overview
MPG Video Clip (2.5M)
The BlueDRAGON graphical user interface incorporating real-time data with the visual view of the endoscope
MPG Video Clip (5.2M)
The BlueDRAGON CAD rendering
MPG Video Clip (7.8M)