Markov Model Assessment of Subjects' Clinical Skill Using the E-Pelvis Physical Simulator
Inherent difficulties evaluating clinical competence of
physicians has led to the widespread use of subjective skill assessment
techniques. Inspired by an analogy between spoken language
and surgical procedure, a generalized methodology using Markov
models (MMs), independent of the modality under study, was developed.
The methodology applied to an endoscopic experiment in
“Generalized approach for modeling minimally invasive surgery
as a stochastic process using a discrete Markov model” by J. Rosen
et al. [![]() JP9] is modified and applied to data collected with the E-Pelvis
physical simulator. The simulator incorporates five contact pressure
sensors located in key anatomical landmarks. Two 32-state
fully connected MMs are used, one for each skill level. Each state
corresponds to a unique five-dimensional signature of contact pressures.
Statistical distances measured between models representing
subjects with different skill levels are sensitive enough to provide
an objective measure of medical skill level. The method was tested
with 41 expert subjects and 41 novice subjects in addition to the
30 subjects used for training the MM. Of the 82 subjects, 76 (92%)
were classified correctly. Unique state transitions as well as pressure
JP9] is modified and applied to data collected with the E-Pelvis
physical simulator. The simulator incorporates five contact pressure
sensors located in key anatomical landmarks. Two 32-state
fully connected MMs are used, one for each skill level. Each state
corresponds to a unique five-dimensional signature of contact pressures.
Statistical distances measured between models representing
subjects with different skill levels are sensitive enough to provide
an objective measure of medical skill level. The method was tested
with 41 expert subjects and 41 novice subjects in addition to the
30 subjects used for training the MM. Of the 82 subjects, 76 (92%)
were classified correctly. Unique state transitions as well as pressure
magnitudes for corresponding states were found to be skill
dependent. The “white box” nature of the model provides insight
into the examination process performed.
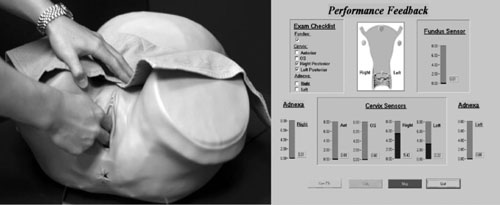
Figure: E-Pelvis Simulator. (Left) Simulated pelvic exam with the physical simulator.
(Right) Graphical user interface.
Visualization of a pelvic exam recorded by the 5 pressure sensors of the e-pelvic simulator
Device
E-Pelvis
| Status: Completed |
PUblications
(*) Note: Most of the Bionics Lab publications are available on-line in a PDF format. You may used the publication's reference number as a link to the individual manuscript.
[![]() JP17] Mackel Thomas R., Jacob Rosen, C. Pugh, Markov Model Assessment of Subjects' Clinical Skill Using the E-Pelvis Physical Simulator, IEEE Transactions on Biomedical Engineering, Vol. 52, Issue 12, pp. 2133-2141, Dec. 2007
JP17] Mackel Thomas R., Jacob Rosen, C. Pugh, Markov Model Assessment of Subjects' Clinical Skill Using the E-Pelvis Physical Simulator, IEEE Transactions on Biomedical Engineering, Vol. 52, Issue 12, pp. 2133-2141, Dec. 2007
[![]() JP9] Rosen Jacob, Jeffrey D. Brown, Lily Chang, Mika N. Sinanan Blake Hannaford, Generalized Approach for Modeling Minimally Invasive Surgery as a Stochastic Process Using a Discrete Markov Model, IEEE Transactions on Biomedical Engineering Vol. 53, No. 3, March 2006, pp. 399 - 413.
JP9] Rosen Jacob, Jeffrey D. Brown, Lily Chang, Mika N. Sinanan Blake Hannaford, Generalized Approach for Modeling Minimally Invasive Surgery as a Stochastic Process Using a Discrete Markov Model, IEEE Transactions on Biomedical Engineering Vol. 53, No. 3, March 2006, pp. 399 - 413.