Evaluating the influence of inertia and friction produced by a geared DC motor on the haptic sensation
Endoscopic haptic surgical devices have shown promise in addressing the loss of tactile sensation associated with minimally invasive surgery. However, these devices must be capable of generating forces and torques similar to those applied on the tissue with a standard endoscopic tool. Geared motors are a possible solution for actuation; however; they possess mechanical characteristics that could potentially interfere with tactile perception of tissue qualities. The aim of the current research was to determine how the characteristics of a geared motor suitable for a haptic surgical device affect a user's perception of stiffness. The experiment involved six blindfolded subjects who were asked to discriminate the stiffness of six distinct silicone rubber samples whose mechanical properties are similar to those of soft tissue. Using a novel testing device whose dimensions approximated those of an endoscopic grasper, each subject palpated 30 permutations of sample pairs for each of three types of mechanical loads; the motor (friction and inertia), a flywheel (with the same inertia as motor), and a control (no significant mechanical interference). One factor ANOVA of the error scores and palpation time showed that no significant difference existed among error scores, but mean palpation time for the control was significantly less than for the other two methods. These results indicated that the mechanical characteristics of a geared motor chosen for application in a haptic surgical device did not interfere with the subjects' perception of the silicone samples' stiffness, but these characteristics may significantly affect the energy expenditure and time required for tissue palpation. Therefore, before geared motors can be considered for use in haptic surgical devices, consideration should be given to factors such as palpation speed and fatigue.
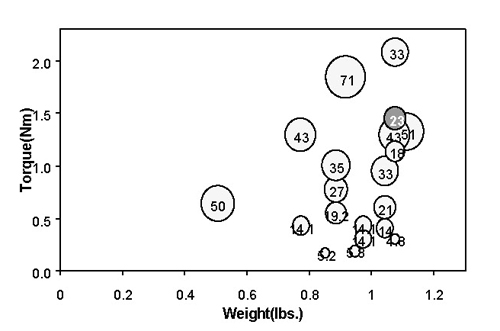
Geared Motor Comparison: Max Continuous Torque Vs. Weight Vs. Gear Ratio (gear ratio denoted by size of circles and numerical value)
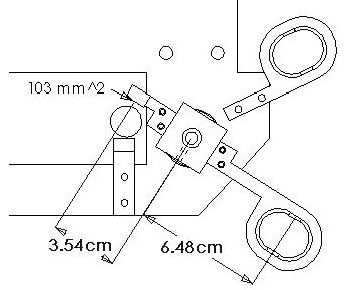
Top View of the Device Palpating a Silicone Rubber Sample
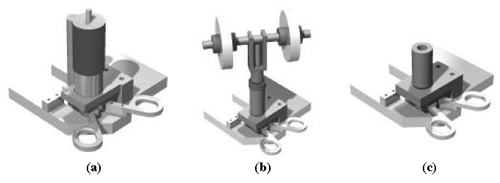
Different Configurations of Testing Device: (a) Geared motor (b) Flywheel (c) Control
Device
Instrumented laparoscopic Tool
| Status: Completed |
PUblications
(*) Note: Most of the Bionics Lab publications are available on-line in a PDF format. You may used the publication's reference number as a link to the individual manuscript.
[![]() CP6] Longnion Jeff, Jacob Rosen, Mika N. Sinanan, Blake Hannaford, Effects of Geared Motor Characteristics on Tactile Perception of Tissue Stiffness, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, Vol. 81, pp. 286-292, IOS Press, January 2001.
CP6] Longnion Jeff, Jacob Rosen, Mika N. Sinanan, Blake Hannaford, Effects of Geared Motor Characteristics on Tactile Perception of Tissue Stiffness, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, Vol. 81, pp. 286-292, IOS Press, January 2001.