Tissue Damage due to Mechanical Stresses
While there are many benefits to minimally invasive surgery (MIS),
force feedback or touch sensation is limited in the currently available
MIS tools, such as surgical robots, creating the potential for excessive
force application during surgery and unintended tissue injury.
The goal of this work was to develop a methodology with which to
identify stress magnitudes and durations that can be safely applied
with a MIS grasper to different tissues, potentially improving MIS device
design and reducing potentially adverse clinically relevant consequences.
Using the porcine model, stresses typically applied in MIS were applied to liver, ureter and small bowel using a motorized endoscopic grasper. Acute indicators of tissue damage including cellular death and infiltration of inflammatory cells were measured using histological and image analysis techniques. Finite element analysis was used to identify approximate stress distributions experienced by the tissues. Parameters used in these finite element models specifically reflected the properties of liver, which served as an initial proxy for all tissues, as stress distributions rather than absolute values were desired. Local regions predicted to have uniform stress by the computational models were mapped to and analyzed in the tissue samples for acute damage. Analysis of variance (ANOVA) and post-hoc analyses were used to detect stress magnitudes and durations that caused significantly increased tissue damage with the goal to ultimately identify safe stress ‘thresholds’ during grasping of the studied tissues.
Preliminary data suggests a graded non-linear response between applied stress magnitude and apoptosis in liver and small bowel as well as neutrophil infiltration in the small bowel. The ureter appeared to be more resistant to injury at the tested stress levels.
By identifying
stress magnitudes and durations within the range of grasping loads
applied in MIS, it may be possible for researchers to create a ‘smart’
surgical robot that can guide a surgeon to manipulate tissues with
minimal resulting damage. In addition, surgical simulator design can
be improved to reflect more realistic tissue responses and evaluate
trainees’ tissue handling skills.
Figure: (a) CAD drawing of the MEG (b) close-up of MEG’s Babcock grasper end effector and (c) MEG mechanism
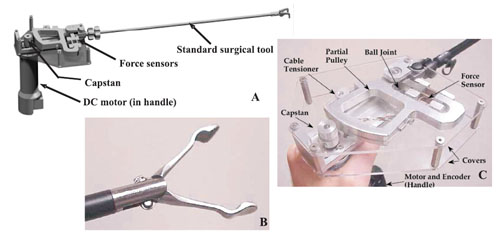
Figure: (a) Schematic diagrams of the tissue grasper cross-section during in vivo stress application. (b) In vivo image of small bowel after three stress applications. Sutures and ink (arrows) mark crush sites since no clear visual change is apparent at tissue harvesting. (c) In vivo image ofMEG applying stress to ureter. (d) In vivo image of liver with multiple compression sites (arrows).
Lower stresses (60 kPa) begin at upper left with increasing stress magnitudes up to the highest stresses (240 kPa) at lower right
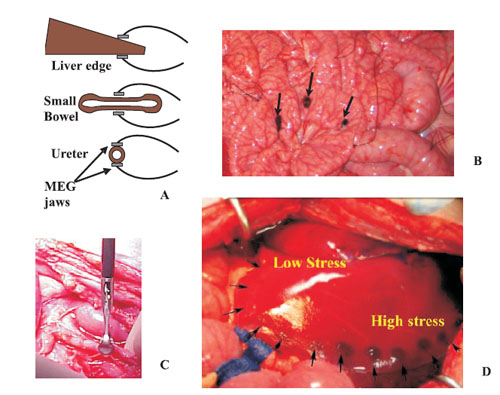
Figure: H&E stain, 10 second grasp for (a) small bowel and (b– d) liver. (a) Cross-section with lumen at the top, 220 kPa. Clear destruction of villi, abnormal crypts (*), break in line indicates break in endothelial barrier. (b) Control (0 kPa), normal hepatocytes and sinusoids (*) (c) 100 kPa, contracted cells and eosinophilia (outlined) with some normal hepatocytes and (d) 200 kPa, increased eosinophilia (outlined), abnormal nuclei and loss of sinusoids.
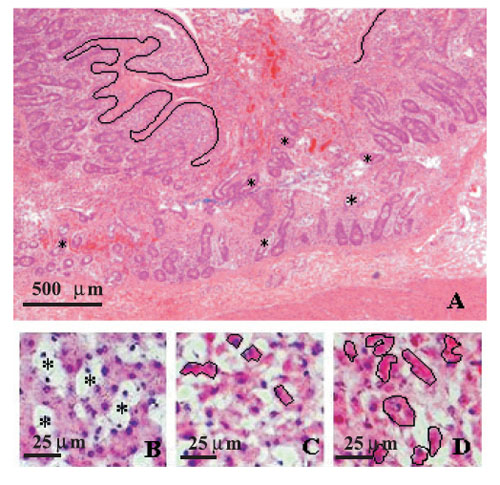
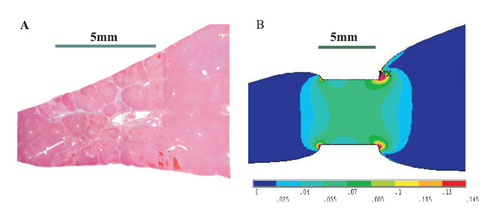
Figure: (a) H&E section of liver with an applied vertical compression. Bar indicates width of contact with grasper jaws. (b)
Close-up of von Mises stress plot of FEA using linear material properties. Scale is in MPa. MX marks the region of maximum
stress.
Device
Motorized Endoscopic Grasper (MEG)
| Status: Completed |
PUblications
(*) Note: Most of the Bionics Lab publications are available on-line in a PDF format. You may used the publication's reference number as a link to the individual manuscript.
[![]() JP18] Rosen Jacob, Jeffrey D. Brown, Smita De, Mika N. Sinanan Blake Hannaford, Biomechanical Properties of Abdominal Organs In Vivo and Postmortem Under Compression Loads, ASME Journal of Biomedical Engineering, Vol. 130, Issue 2, April 2008
JP18] Rosen Jacob, Jeffrey D. Brown, Smita De, Mika N. Sinanan Blake Hannaford, Biomechanical Properties of Abdominal Organs In Vivo and Postmortem Under Compression Loads, ASME Journal of Biomedical Engineering, Vol. 130, Issue 2, April 2008
[![]() JP16] De Smita, Jacob Rosen, A. Dagan, P. Swanson, Mika N. Sinanan, and Blake Hannaford, Assessment of Tissue Damage due to Mechanical Stresses, International Journal of Robotic Research, Vol. 26, No. 11-12, 1159-1171 (2007)
JP16] De Smita, Jacob Rosen, A. Dagan, P. Swanson, Mika N. Sinanan, and Blake Hannaford, Assessment of Tissue Damage due to Mechanical Stresses, International Journal of Robotic Research, Vol. 26, No. 11-12, 1159-1171 (2007)
[![]() CP25] De Smita, P. Swanson, Mika N. Sinanan, Jacob Rosen, A. Dagan, and Blake Hannaford, Assessment of Tissue Damage due to Mechanical Stresses, Proceedings of the 2006 BioRob Conference, Pisa, Italy, February, 2006.
CP25] De Smita, P. Swanson, Mika N. Sinanan, Jacob Rosen, A. Dagan, and Blake Hannaford, Assessment of Tissue Damage due to Mechanical Stresses, Proceedings of the 2006 BioRob Conference, Pisa, Italy, February, 2006.
[![]() CP26] De Smita, Aylon Dagan, Phil Roan, Jacob Rosen, Mika N. Sinanan, Maya Gupta, Blake Hannaford, CIELab and sRGB Color Values of in vivo Normal and Grasped Porcine Liver, Proceedings of Medicine Meets Virtual Reality (MMVR 15) pp.109-111, Long Beach CA, Feb. 6-9, 2007
CP26] De Smita, Aylon Dagan, Phil Roan, Jacob Rosen, Mika N. Sinanan, Maya Gupta, Blake Hannaford, CIELab and sRGB Color Values of in vivo Normal and Grasped Porcine Liver, Proceedings of Medicine Meets Virtual Reality (MMVR 15) pp.109-111, Long Beach CA, Feb. 6-9, 2007