Grasping with Force Feedback in Minimally Invasive Surgery
Endoscopic graspers are usually manipulated by a human. This situation raises the question regarding the psychophysical aspects of the Force Feedback endoscopic Grasper (FREG) performance. The experimental protocol was designed to examine the operator ability to rank a group of materials, with similar biomechanical characteristics of soft tissue, according to their stiffness using three tools: (i) the FREG in a force feedback bi-lateral mode (ii) a regular endoscopic grasper, commonly used in MIS, and (iii) touching the materials with the hand (with a latex glove) as traditionally done in open surgery. The same Babcock tool was used by the FREG and the regular grasper during the subjective experiment.
Ten test operators divided into two groups (surgeon group and control group) were asked to rank eight materials according to their stiffness using three tools. The surgeon group included experienced general surgeons specialized in minimally invasive surgery. The control group included engineers without any medical background. The two groups included subjects with the same gender (male) and similar average age.
The statistical null hypothesis (H0) was that all the tools (standard endoscopic grasper, FREG, and hand) are equal in their performance for ranking material stiffness. The index of performances was calculated as the Mean Squared Error (MSE) of the estimated ranking (ER) relative to the correct ranking (CR). For the six materials (n=6) used in the subjective experiment, the MSE value has a range of < 0, 11.66 >. When a test operator ranks the materials exactly according to their correct stiffness order the MSE has a value of 0. The upper boundary of MSE value of 11.6 can be achieved when the test operator ranks the material in the opposite manner. Two way analysis of variance (2D ANOVA) was used to analyze the differences between instruments within group - 3 levels (Regular endoscopic grasper, FREG, and hand) and between groups - 2 levels (surgeon group and control group).
The two-way ANOVA statistical test showed a significant difference between the performance obtained by the three tools. The best performance in ranking the materials according to their stiffness was achieved by using the hand (MSE=0.25), whereas the worst performance was obtained by the standard endoscopic grasper (MSE=3.15). The performance of the FREG (MSE=1.07) was between the previous two, and closer to the performance of the hand than the grasper. The analysis suggests that there is no significant difference between the two operator groups (Surgeons and Control) that were tested. From the results above, the null hypothesis (H0) may be rejected. There is a significant difference between the performances of the three tools in ranking the materials according to their stiffness.
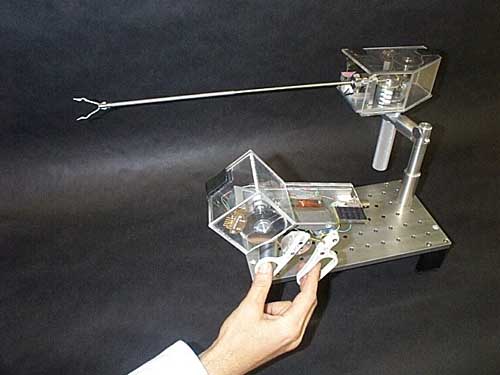
Device
Force Reflecting Endoscopic Grasper (FREG)
| Status: Completed |
PUblications
(*) Note: Most of the Bionics Lab publications are available on-line in a PDF format. You may used the publication's reference number as a link to the individual manuscript.
MacFarlane Mark, Jacob Rosen, Blake Hannaford, Carlos Pellegrini, Mika N. Sinanan, Force Feedback Grasper Helps Restore the Sense of Touch in Minimally Invasive Surgery, Journal of Gastrointestinal Surgery, Vol. 3, No. 3, pp. 278-285, May/June 1999. [![]() JP1]
JP1]
Rosen Jacob, Blake Hannaford, Mark MacFarlane, Mika N. Sinanan, Force Controlled and Teleoperated Endoscopic Grasper for Minimally Invasive Surgery - Experimental Performance Evaluation, IEEE Transactions on Biomedical Engineering, Vol. 46, No. 10, pp. 1212-1221, October 1999. [![]() JP2]
JP2]
Hannaford B., J. Trujillo, Mika N. Sinanan, M. Moreyra, Jacob Rosen, J. Brown, R. Lueschke, Mark MacFarlane, Computerized Endoscopic Surgical Grasper, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, Vol. 50, pp. 265-271, IOS Press, January 1998.[![]() CP2]
CP2]
Rosen Jacob, Mark MacFarlane, C. Richards, Blake Hannaford, Carlos Pellegrini, Mika N. Sinanan, Surgeon/Endoscopic Tool Force-Torque Signatures In The Evaluation of Surgical Skills During Minimally Invasive Surgery, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, Vol. 62, pp. 290-296, IOS Press, January 1999. [![]() CP3]
CP3]
Longnion Jeff, Jacob Rosen, Mika N. Sinanan, Blake Hannaford, Effects of Geared Motor Characteristics on Tactile Perception of Tissue Stiffness, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, Vol. 81, pp. 286-292, IOS Press, January 2001. [![]() CP6]
CP6]