Red Dragon (Edge)
With the development of new technologies in surgery, minimally invasive surgery (MIS) has drastically improved the way conventional medical procedures are performed. However, a new learning curve has resulted requiring an expertise in integrating visual information with the kinematics and dynamics of the surgical tools.
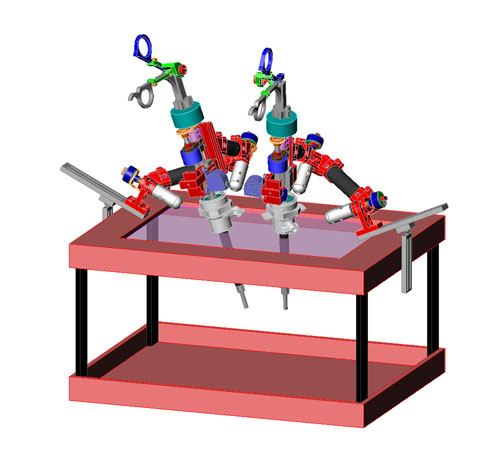
The Red DRAGON is a multi-modal simulator for teaching and training MIS procedures allowing one to use it with several modalities including: simulator (physical objects and virtual objects) and an animal model. The Red DRAGON system is based on a serial spherical mechanism in which all the rotation axes intersect at a single point (remote center) allowing the endoscopic tools to pivot around the MIS port. The system includes two mechanisms that incorporate two interchangeable MIS tools. Sensors are incorporated into the mechanism and the tools measure the positions and orientations of the surgical tools as well as forces and torques applied on the tools by the surgeon.
The design is based on a mechanism optimization to maximize the manipulability of the mechanism in the MIS workspace. As part of a preliminary experimental protocol, five expert level surgeons performed three laparoscopic tasks – a subset of the Fundamental Laparoscopic Skill (FLS) set as a baseline for skill assessment protocols. The results provide an insight into the kinematics and dynamics of the endoscopic tools, as the underlying measures for objectively assessing MIS skills.
Notes:
![]() The design of the Red Dragon won the silver award of the James F. Lincoln Foundation’s student engineering design competition (Scott Gunther and Jacob Rosen) on November 2006
The design of the Red Dragon won the silver award of the James F. Lincoln Foundation’s student engineering design competition (Scott Gunther and Jacob Rosen) on November 2006
![]() The Red Dragon is commercialized through a tech transfer by Simulab Corporation. It is currently known as the Edge.
The Red Dragon is commercialized through a tech transfer by Simulab Corporation. It is currently known as the Edge.
The Red Dragon – CAD rendering
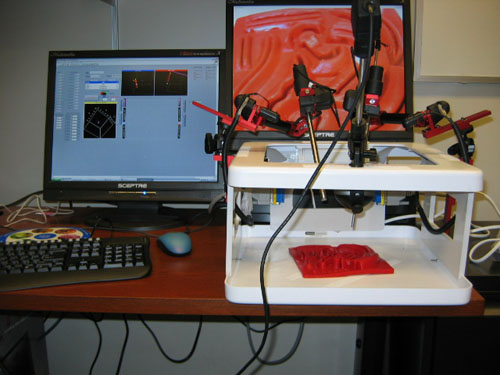
The Red Dragon – System Overview
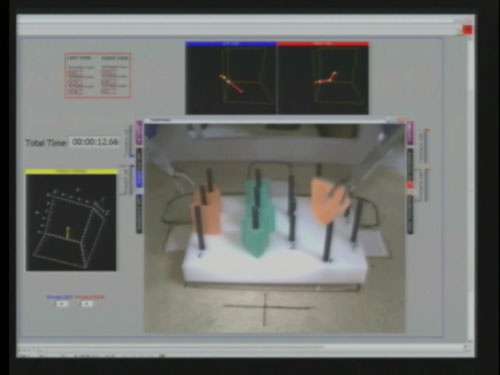
The Red Dragon – User Interaction

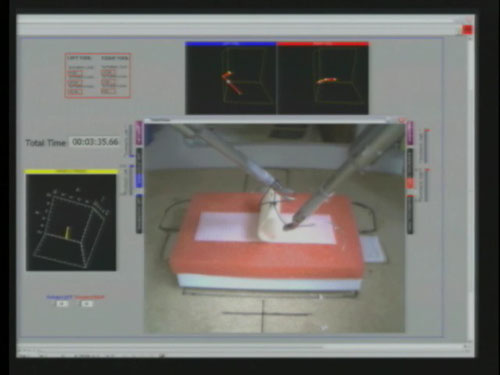
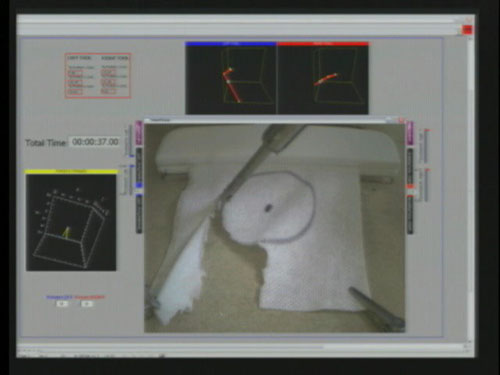
The Red Dragon – Typical User Interfaces screen for various FLS tasks
Lincoln Foundation Award
PUblications
(*) Note: Most of the Bionics Lab publications are available on-line in a PDF format. You may used the publication's reference number as a link to the individual manuscript.
Rosen J., J. D. Brown, L. Chang, M. Sinanan B. Hannaford, Generalized Approach for Modeling Minimally Invasive Surgery as a Stochastic Process Using a Discrete Markov Model, IEEE Transactions on Biomedical Engineering Vol. 53, No. 3, March 2006, pp. 399 - 413 [![]() JP9]
JP9]
Gunther S., J. Rosen, B. Hannaford, M. Sinanan, The Red DRAGON: A Multi-Modality System for Simulation and Training in Minimally Invasive Surgery, Proceedings of Medicine Meets Virtual Reality (MMVR 15) pp. 149-154, Long Beach CA, Feb. 6-9, 2007 [![]() CP29]
CP29]