Motorized Endoscopic Grasper (MEG)
Accurate biomechanical characteristics of tissues is essential for developing realistic virtual reality surgical simulators using haptic devices. Surgical simulation technology has progressed rapidly but without a large database of soft tissue mechanical properties with which to incorporate. In addition, the majority of the research that has been done on measuring mechanical properties of abdominal soft tissues was performed in vitro, on animals and cadavers. As simulation technologies continue to be capable of modeling more complex behavior, a tissue property database needs to be developed to fill this gap. This problem has been addressed in recent work with a variety of tools and techniques.
We have adapted our previous design for the force-reflecting endoscopic grasper (FREG) to a motorized endoscopic grasper (MEG) that uses a brush DC motor instead of a voice-coil actuator. The motor is attached to a capstan that drives a cable and partial pulley. The pulley is attached to a ball joint that converts the rotational motion of the motor and pulley to a linear translation. The motor is capable of producing 29 mNm of continuous torque, but it is coupled with a 19:1 planetary gearhead and partial pulley that increase the torque to 3.98 Nm. This torque is equivalent to 52 N of grasping force applied by a surgeon on an endoscopic grasper's finger loops, close to the maximum value applied by surgeons in our previous work. Standard laparoscopic instruments can be attached to the base plate mount and inserted into the ball joint. Two strain gage force sensors are embedded in the pulley to provide accurate grasping force measurement. A digital encoder, attached to the motor, measures position. Computer control is provided real-time via a PC using a PD controller implemented in Simulink and custom dSPACE user interface. The MEG is a hand-held device that weighs 0.7 kg (including grasper) and can be inserted into the body through regular endoscopic ports to perform computer-controlled dynamic and static uniaxial compressive displacements (position-controlled) of soft tissues.
The MEG was used to measure biomechanical characteristics of porcine tissues in vivo of the following organs: liver, spleen, lung, stomach, small bowel, and colon through a series of static and dynamic grasping tests. The resulting force-deformation data were transformed to stress-strain, which were further processed to obtain elastic modulus, creep time constant, stress relaxation time constant. Tissue types exhibited significant differences in properties. Tissue property inhomogeneity was also studied.
The MEG will help provide realistic data for surgical simulation and corroborate the results of other researchers. Future work will be to compare in vivo MEG data with in vitro MEG and universal testing machine data to observe the changes in tissue mechanical properties postmortem.
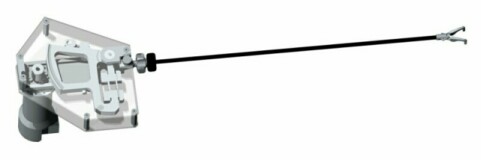
Figure - MEG - Rendered CAD drawing
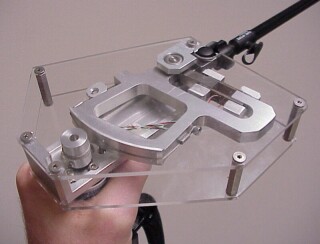
Figure - MEG - Close-up photograph of the hand-held mechanism

Figure - MEG - Close-up photograph of Babcock grasper
Projects
Tissue Damage due to Mechanical Stresses
Device: MEG
Methodology: In Vivo / In Sitro measurements - Animal Model
Status: Completed
Biomechanical Characteristics of Internal Organs' Soft Tissues - In-Vivo measurements in minimally Invasive Surgery
Device: MEG & MTS Machine
Methodology: In Vivo / In Sitro measurements - Animal Model
Status: Completed
Grasping with Force Feedback in Minimally Invasive Surgery
Device: Force Reflecting Endoscopic Grasper
Methodology: Human study, Silicon Rubber
Number of Subjects: 8 Humans (4 Surgeons and 4 non-surgeon)
Status: Complete
PUblications
(*) Note: Most of the Bionics Lab publications are available on-line in a PDF format. You may used the publication's reference number as a link to the individual manuscript.
Rosen J., J. D. Brown, S. De, M. Sinanan B. Hannaford, Biomechanical Properties of Abdominal Organs In Vivo and Postmortem Under Compression Loads, ASME Journal of Biomedical Engineering, Vol. 130, Issue 2, April 2008 [![]() JP18]
JP18]
De S., J. Rosen, A. Dagan, P. Swanson, M. Sinanan, and B. Hannaford, Assessment of Tissue Damage due to Mechanical Stresses, International Journal of Robotic Research, Vol. 26, No. 11-12, 1159-1171 (2007) [![]() JP16]
JP16]
Hannaford B., J. Trujillo, M. Sinanan, M. Moreyra, J. Rosen, J. Brown, R. Lueschke, M. MacFarlane, Computerized Endoscopic Surgical Grasper, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, Vol. 50, pp. 265-271, IOS Press, January 1998.[![]() CP2]
CP2]
Brown D. J., J. Rosen, M. Moreyra, M. Sinanan, B. Hannaford, 'Computer-Controlled Motorized Endoscopic Grasper for In Vivo Measurements of Soft Tissue Biomechanical Characteristics,' Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, vol. 85, pp. 71-73, IOS Press, January 2002 [![]() CP9].
CP9].
Brown J. D., J. Rosen, Y. S. Kim, L. Chang, M. Sinanan, B. Hannaford, In-Vivo and In-Situ Compressive Properties of Porcine Abdominal Soft Tissues, Studies in Health Technology and Informatics - Medicine Meets Virtual Reality, vol. 94, pp. 26-32, IOS Press, January 2003 [![]() CP12].
CP12].
Brown J. D. J. Rosen, M. N. Sinanan, B. Hannaford, In-Vivo and Postmortem Compressive Properties of Porcine Abdominal Organs, Lecture Notes in Computer Science, Volume 2878 / 2003, pp. 238 –245, Medical Image Computing and Computer-Assisted Intervention - MICCAI 2003, Toronto, Canada [![]() CP13].
CP13].
De S., P. Swanson, M. Sinanan, J. Rosen, A. Dagan, and B. Hannaford, Assessment of Tissue Damage due to Mechanical Stresses, Proceedings of the 2006 BioRob Conference, Pisa, Italy, February, 2006. [![]() CP25]
CP25]
De. S., A. Dagan, P. Roan, J. Rosen, M. Sinanan, M. Gupta, B. Hannaford, CIELab and sRGB Color Values of in vivo Normal and Grasped Porcine Liver, Proceedings of Medicine Meets Virtual Reality (MMVR 15) pp.109-111, Long Beach CA, Feb. 6-9, 2007 [![]() CP26]
CP26]
Multimedia
MEG -- Data Acquisition: Large Bowel, 3 Hz
MPG Video Clip (677Kb)