The Human Arm Kinematics and Dynamics During Daily Activities – Toward a 7 DOF Upper Limb Powered Exoskeleton
Integrating human and robot into a single system offers remarkable opportunities for creating a new generation of assistive technology. Having obvious applications in rehabilitation medicine and virtual reality simulation, such a device would benefit both the healthy and disabled population. The aim of the research is to study the kinematics and the dynamics of the human arm during daily activities in a free and unconstrained environment as part of an on-going research involved in the design of a 7 degree of freedom (DOF) powered exoskeleton for the upper limb.
The kinematics of the upper limb was acquired with a motion capture system while performing a wide verity of daily activities. Utilizing a model of the human as a 7 DOF system, the equations of motion were used to calculate joint torques given the arm kinematics.
During positioning tasks, higher angular velocities were observed in the gross manipulation joints (the shoulder and elbow) as compared to the fine manipulation joints (the wrist). An inverted phenomenon was observed during fine manipulation in which the angular velocities of the wrist joint exceeded the angular velocities of the shoulder and elbow joints. Analyzing the contribution of individual terms of the arm’s equations of motion indicate that the gravitational term is the most dominant term in these equations. The magnitudes of this term across the joints and the various actions is higher than the inertial, centrifugal, and Coriolis terms combined.
Variation in object grasping (e.g. power grasp of a spoon) alters the overall arm kinematics in which other joints, such as the shoulder joint, compensate for lost dexterity of the wrist. The collected database along with the kinematics and dynamic analysis may provide the fundamental understanding for designing powered exoskeleton for the human arm.
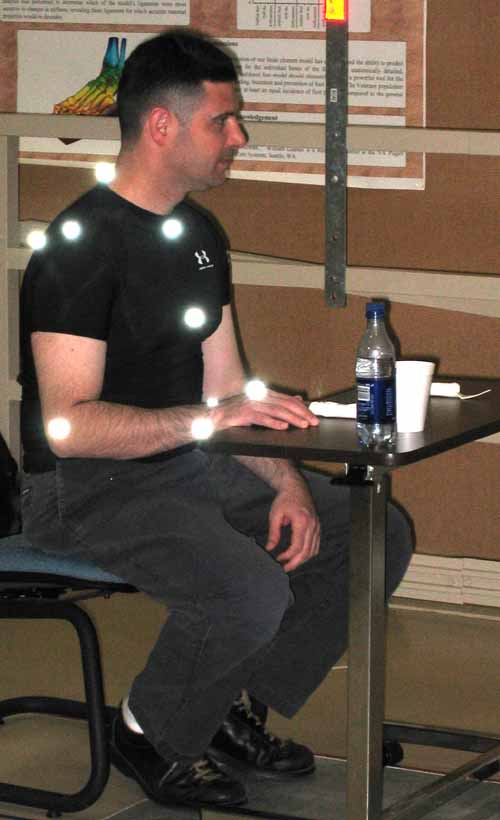
Figure - The Kinematics of the arm - A subject with reflected markers performing daily activities. The kinematics of the arm is recorded with a motion capturing system (Vicon)
Activities of daily living preformed in a motion capturing lab.
Recorded data played back with a model of the human arm
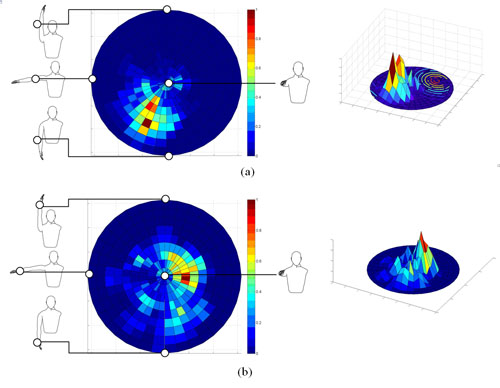
Figure: Histograms depicting the distribution of the elbow (a) and wrist (b) joint positions in a polar coordinate system with respect to the middle of the Humerus. One may note that the distance between the elbow joint the shoulder joint is fixed and dictated by the length of the upper arm, however the distance between shoulder joint and the wrist joint vary and depends on elbow joint angle. This distance is omitted from (b). Key arm configurations and the corresponding locations on the graph are depicted. Color represents the probability in which a specific joint location (elbow and wrist) was observed in the database.
Device
Upper-Limb Exoskeleton Prototype 3
EXO-UL7
The third upper-limb exoskeleton prototype composed of two arms with seven DOF each (3 shoulder joint; 1 elbow joint; 3 wrist) aimed to study fully functional multiple joint movements of the human arms.
| Status: Active Research |
PUblications
(*) Note: Most of the Bionics Lab publications are available on-line in a PDF format. You may used the publication's reference number as a link to the individual manuscript.
[![]() CP19] Rosen J,, J. C. Perry, N. Manning, S. Burns, B. Hannaford, The Human Arm Kinematics and Dynamics During Daily Activities – Toward a 7 DOF Upper Limb Powered Exoskeleton, - ICAR 2005 – Seattle WA, July 2005.
CP19] Rosen J,, J. C. Perry, N. Manning, S. Burns, B. Hannaford, The Human Arm Kinematics and Dynamics During Daily Activities – Toward a 7 DOF Upper Limb Powered Exoskeleton, - ICAR 2005 – Seattle WA, July 2005.
[![]() CP24] Perry J.C., J. Rosen, Design of a 7 Degree-of-Freedom Upper-Limb Powered Exoskeleton Proceedings of the 2006 BioRob Conference, Pisa, Italy, February, 2006.
CP24] Perry J.C., J. Rosen, Design of a 7 Degree-of-Freedom Upper-Limb Powered Exoskeleton Proceedings of the 2006 BioRob Conference, Pisa, Italy, February, 2006.
[![]() JP15] Rosen J., and J.C. Perry, Upper Limb Powered Exoskeleton, Journal of Humanoid Robotics, Vol. 4, No. 3 (2007) 1–20
JP15] Rosen J., and J.C. Perry, Upper Limb Powered Exoskeleton, Journal of Humanoid Robotics, Vol. 4, No. 3 (2007) 1–20