Performance Evaluation of a One DOF Myosignal-Based Powered Exoskeleton System
Integrating humans and robotic machines in one system offers a world of opportunities for creating a new generation of assistance technology that can be used in biomedical, industrial and aerospace applications. The human system contributes its natural and highly developed control algorithms that utilizes advanced decision making and specialized fuzzy sensing mechanisms, whereas the robotic system offers technological advantages such as power, accuracy and speed.
The powered Exoskeleton is a class of robot manipulators which extends the human muscle strength while maintaining human control of the task. The Exoskeleton joint system correspond to those of the human body and allows direct transformation of both power and information signals through a Human/Exoskeleton interface. Throughout the last three decades, two generations of the Exoskeleton architecture have been evaluated. The first generation used the master-slave concept based on kinematics control. The second generation used the concept of direct contact at the Human/Exoskeleton interface based on dynamics control.
Positioning the level of the man-machine interface (MMI) for the Human/Exoskeleton system is a key condition critical to the overall performance of the system, and thereby determines the quality of integration. As the MMI stage is set at higher levels of the human physiological hierarchy, the reaction time of the system decreases and the system is being manipulated more naturally. This thesis proposes a new generation of Exoskeleton which raises the MMI level to the human neuromuscular junction using myosignals (processed Electromyography - EMG) as command signals for the Exoskeleton system. Setting the man machine interfaces at the EMG stage of the human neuromuscular physiological hierarchy improves the performance of the integrated Human/Exoskeleton system and opens new horizons for applying the system to both healthy and disabled subjects.
The evaluation of the new concept was carried out using an experimental Exoskeleton arm which integrates the human arm and a mechanical structure with a powered elbow joint controlled by a personal computer. This experimental system was used to study different operational features and control algorithms. The hardware allowed the maneuvering of the Exoskeleton for evaluating the performance envelope. The software and its graphical user interface provided the flexibility needs for designing, transforming and adjusting the control schemes and to generate real-time executable programs. In addition, data analysis algorithms enabled off-line analyses of the data acquired during the experiments.
The key element of the myosignal based Exoskeleton system is the myoprocessor. The myoprocessor simulates the human muscles and predicts the muscle forces, before the contraction phenomena in the real muscle takes place. This estimation is performed based on three inputs: (i) the levels of neural activation indicated by the EMG signals, (ii) the joint position and (iii) the joint angular velocity. Two types of muscle models were studied: the Hill-based model, and an artificial neural network system. The practical use of muscle models as myoprocessors in the Exoskeleton system, working in a real time mode, leads to the implementation of a lumped version of flexor/extensor elbow joint muscles, using the Hill-based model. The predicted muscle force estimated by the myoprocessor is amplified by the powered Exoskeleton, which results in a controlled movement of the integrated Human-arm/Exoskeleton system. This new concept overcomes the Electromechanical Delay (EMD) which is an inherent physiological phenomena that limited the performance of previous generations of the Exoskeleton. The new generation of Exoskeleton enabled to achieve a significant improvement in the overall performance envelope of the system. In particular, the Exoskeleton operating with the moment controller and a synthesis of myosignals and arm/load moments as an input command signal, achieved gain that was higher by a factor of two (absolute gain value - 16) than the previous Exoskeleton systems (absolute gain value - 8). The practical meaning of such improvement of the performance is that the user, whilst manipulating the myosignal based Exoskeleton, carries small a percentage of the entire external load. The myosignals appeared to improve significantly the Exoskeleton motor command signal to noise ratio (SNR). Improving this ratio, allowed a further increase of the overall mechanical gain of the Exoskeleton system, which is one of the main advantages of the third generation concept over previous generations of the Exoskeleton system.
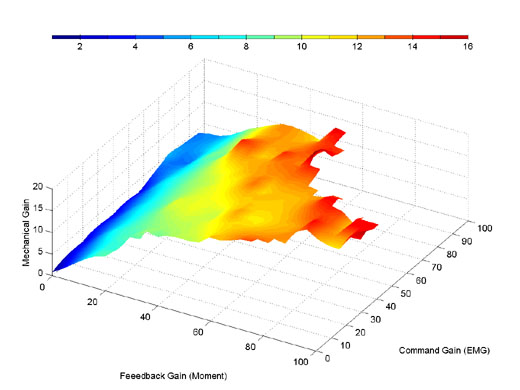
(a)
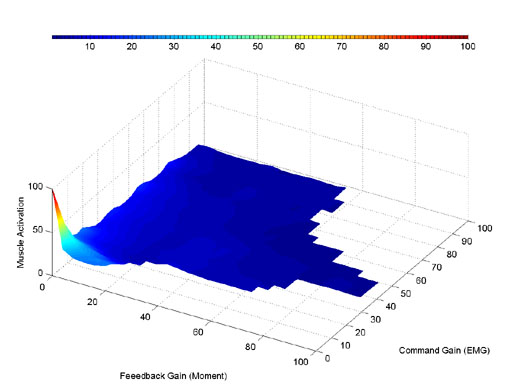
(b)
Figure: The exoskeleton Indices of performance - The overall mechanical moment gain (a) and the normalized compound muscles' activation level (b) of the powered elbow joint measured experimentally as a function of the normalized EMG gain (Input) and the normalized contact moment gain (Feedback). White areas define unstable conditions. The results indicate that with a proper synthesis between the EMG as command signals and contact moments as feedback signals the overall mechanical gain can reach a level of 16 (a). This gain factor means that the operator carried only 5.8% of the external load while all the rest is carried by the exoskeleton's structure and actuators. Using either EMG signals or contact moments alone results in an overall mechanical gain that is lower then the one obtained by synthesizing them together. Moreover, the muscle activation levels at the maximal gain were only 3.2% of their magnitudes when manipulating the same load without the exoskeleton assistance (b). Even at this low level of muscle's neural activation the processed EMG signal were significant enough to provide command inputs to the system.
The potential of using the Exoskeleton as a Medical Assistance Device (MAD) had been evaluated as a test-case for a patient suffering from a Tai-Sachs Disease. The TSD is an inborn error of metabolism due to the deficiency of the enzyme that is critically involved in the catabolism of macromolecules. The disorder is untreatable and progressively destroys neural cells. In a preliminary experiment, a decrease of 75% of the elbow muscle performance was detected relative to a healthy subject. The Exoskeleton allowed the patient to restore his muscle performance with the assistance of the Exoskeleton motor in a way which allowed him to maneuver a weight in the same way like a healthy subject without an Exoskeleton. Several conditions have to be fulfilled for using the Exoskeleton as a MAD for the disabled community. The Exoskeleton is basically an orthotic device which means that the patient must have her/his own upper limb. Moreover, since the Exoskeleton is an assistance device, the patient must have at least a certain limited ability to maneuver her/his own limb. Moreover, the operational principle of the new Exoskeleton concept demands the existence of EMG signals that are correlated with the kinematics/dynamics of the limb and a minimal ability of generating muscle force. With these requirements, a disabled patient who suffers from neuromuscular disorders can operate the Exoskeleton system as a powered orthotic assistance device, in a way which exhibits a new dimension of life quality. Setting the man machine interfaces at the myosignal level of the human neuromuscular physiological hierarchy improves the performance of the integrated Human/Exoskeleton system and opens new horizons for applying the system to both the healthy and disabled population.
Device
Upper-Limb Exoskeleton Prototype 1
EXO-UL1
The upper-limb first exoskeleton prototype is a one DOF system (elbow joint) aimed to study the feasibility of an EMG bioports.
| Status: Completed |
PUblications
(*) Note: Most of the Bionics Lab publications are available on-line in a PDF format. You may used the publication's reference number as a link to the individual manuscript.
Rosen J., M. Brand, M. Fuchs and M. Arcan, A Myosignal-Based Powered Exoskeleton System, IEEE Transactions on System Man and Cybernetics - Part A: Systems and Humans, Vol. 31, No. 3, pp. 210 - 222, May 2001 [![]() JP6].
JP6].
Rosen J., Natural Integration of a Human Arm / Exoskeleton System, Ph.D. Dissertation, Tel-Aviv University, Israel, May 1997