Performances of Hill-Type and Neural Network Muscle Models - Towards a Myosignal Based Exoskeleton
Muscle models are the essential components of any musculo-skeletal simulation. In addition, muscle models which are incorporated in neural based prosthetic and orthotic devices might significantly improve their performance. The aim of the study was to compare the performances of two types of muscle models in terms of predicting the moments developed at human elbow joint complex based on joint kinematics and neuromascular activity. The performance evaluation of the muscle models was required in order to implement them in a powered myosignal driven exoskeleton (orthotic device). The experimental setup included passive exoskeleton capable of measuring the joint kinematics and dynamics in addition to the muscle myosignal activity (EMG). Two types of models were developed and analyzed: (i) Hill based model and (ii) Neural Network. The task which selected in order to evaluate the muscle models performance was the flexion-extension movement of the forearm with a hand weight. For this task the muscle model inputs were the normalized neural activation of the four main flexor-extensor muscles of the elbow joint, the elbow joint angle and angular velocity. Using this inputs, the muscle model output was the prediction of the moment applied on the elbow during the movement. Results indicated a good performance of the Hill model although the Neural Network predictions appear to be superior.
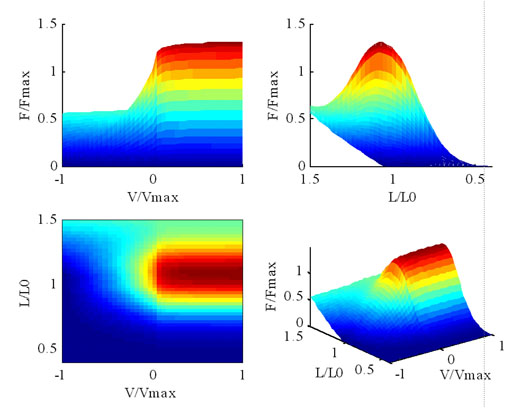
(a)
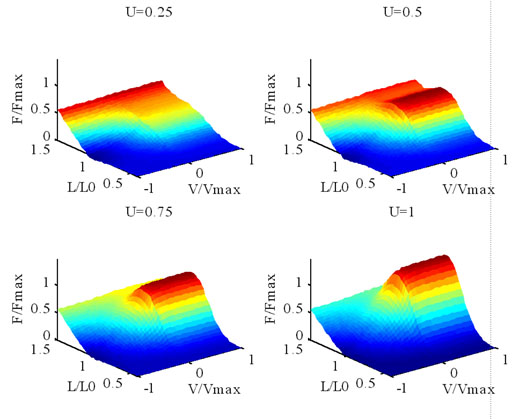
(b)
Figure: Hill based muscle model predicting the muscle's normalized force (F/F0) as a function of the muscle's normalized length (L/L0) and the normalized end point velocities (V/V0) for maximal neural activation U=1 (a) and for intermediate neural activation levels U=0.25, 0.5 0.75, 1 (b)
Device
Upper-Limb Exoskeleton Prototype 1
EXO-UL1
The upper-limb first exoskeleton prototype is a one DOF system (elbow joint) aimed to study the feasibility of an EMG bioports.
| Status: Completed |
PUblications
(*) Note: Most of the Bionics Lab publications are available on-line in a PDF format. You may used the publication's reference number as a link to the individual manuscript.
Rosen J., M. B. Fuchs, and M. Arcan, Performances of Hill-Type and Neural Network Muscle Models - Towards a Myosignal Based Exoskeleton, Computers and Biomedical Research, Vol. 32, No. 5, pp. 415-439, October 1999. [![]() JP3]
JP3]
Rosen J., Natural Integration of a Human Arm / Exoskeleton System, Ph.D. Dissertation, Tel-Aviv University, Israel, May 1997