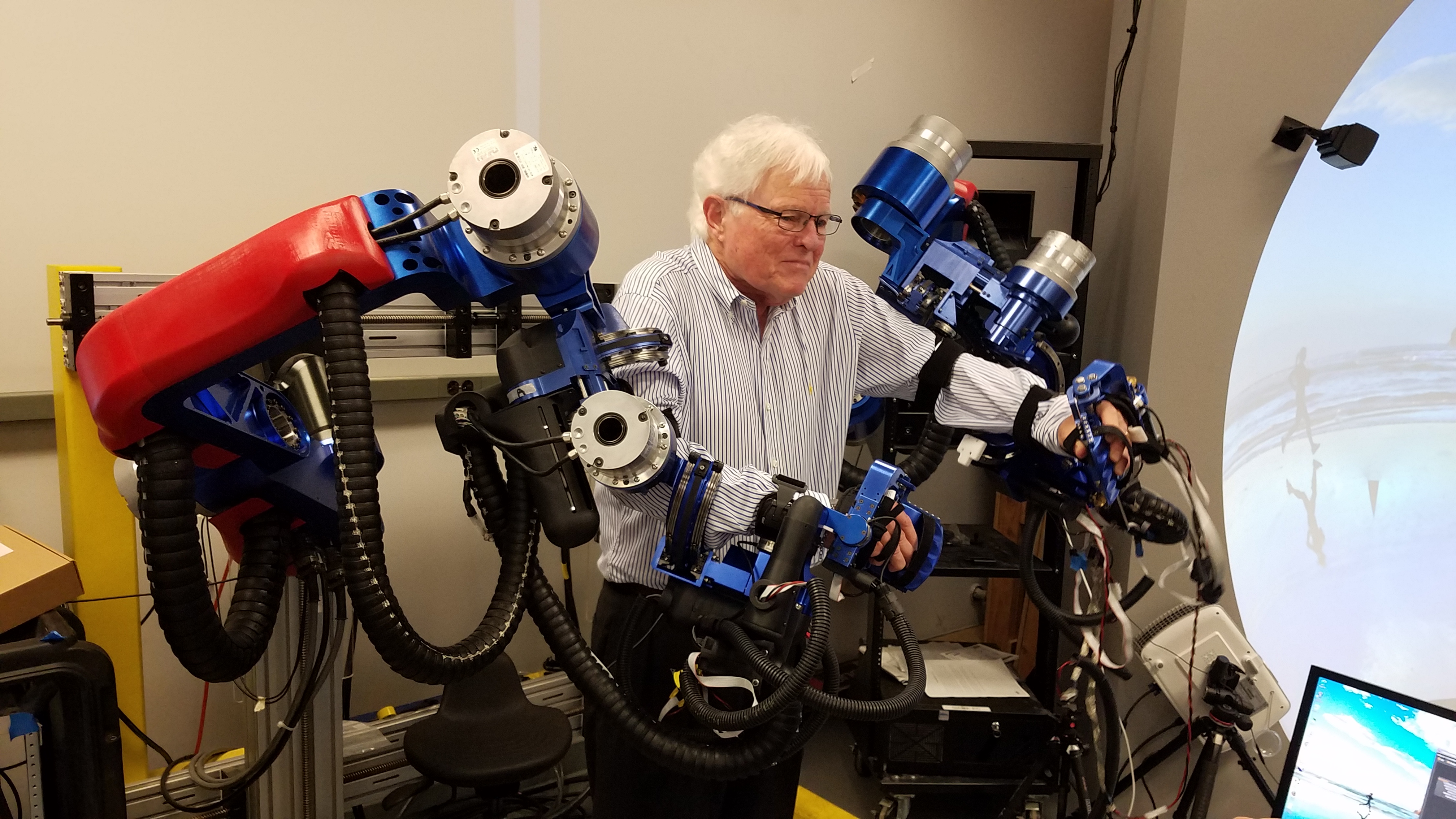
Exoskeleton Prototype 4 (EXO-UL8)
Integrating human and robot into a single system offers remarkable opportunities for creating a new generation of assistive / rehabilitation technology for both healthy and disabled people. The exoskeleton robot, serving as an assistive device, is worn by the human (orthotic) and functions as a human-amplifier. Its joints and links correspond to those of the human body, and its actuators share a portion of the external load with the operator.
System Architecture
The dual exoskeleton system includes two major components: (1) Hardware - robotic mechanism, actuation, sensing and electronics (2) Software - control architecture, and virtual reality environment. The human is physically attached to the exoskeleton system. Contact forces are measured by force sensors placed between the braces (upper arm, forearm, palm, and fingers) and the exoskeleton structure. Joint angles are measured by encoders located on the shafts of the joints. These two type of signals are converted via the A/D and a counter respectively by the real time PC. Using an array of algorithms, encoded into the real time PC, joint torque commands are generated and converted via the D/C by the real-time PC as an inputs to the servo amplifiers. The servo amplifiers operated in a current mode control the actuation system which in turn result in its movement along with the application of the force fields. Feedback control signals are generated based on modes of operation: unilateral or bilateral. Joint angles are also sent via UDP protocol to the Virtual Reality PC. The virtual reality scene including a representation of the operator arm along with all the virtual objects is rendered and displayed to the operator on a screen. The physics engine renders the haptic force fields information that are applied on the operator arms by the exoskeleton system .
Mechanism, Actuation, and Sensing
The forth generation of a dual anthropometric arm exoskeleton system was designed and fabricated based on lessons learned for the extensive use of the system in the past in both a lab and clinical settings with Stroke patients.
• Mechanism (Adjustable Links Length) – The mechanism includes a total of eight DOF (3 DOF for the shoulder joint, 2 DOF for the elbow joint and 2 DOF for the wrist joint along with a 1 DOF of hand). The entire two exoskeleton arms are attached to a portable frame and a chair allowing to change the high and distance (shoulder span) of the two arms. The length of the upper arm and the forearm are adjustable allowing the therapist to fit these two dimensions to various arm length in the range of the 5-95 percentile of the populations’ anthropometric data. The rotation axes of the exoskeleton system intersect at the centers of the anatomical joints in a way that eliminates any potential joint dislocation. The mechanical joint includes hard joint limits that match the range of motion of the anatomical joint. The first three shoulder joint are oriented with respect to the patient in such a way that position the singular configuration of the shoulder joint out of the human arm workspace. Furthermore, a single passive DOF was added to the wrist in addition to the existing two actuated DOF in order to avoid any internal joint torque. The anthropometric design of the exoskeleton allows the user to reach 95% of the workspace accessible by healthy operator. The human operator is physically attached to the exoskeleton arm and interact with the system through five physical interfaces. Three braces are attached to the upper arm, the forearm and the palm. Additional two contact surfaces form the claw type hand interface.
• Actuation – The new generation of the system uses actuators that are directly connected to the each one of the eight DOF of the system. Pancake coil brushless DC actuators with harmonic drive are used for the large joints (shoulder and elbow) and small form factor Maxon DC brashed motor with multistage gearboxes are used for the smaller joint (wrist and hand). The selected actuators have the largest torque to weight ratio available as off-the-shelf actuation system.
• Hands – The new generation of the system includes two types of hands: (1) Claw type single DOF hand and (2) three fingers multi DOF hand. The exoskeleton arm includes a universal interface at the proximal end of the arm allowing to mount and interchange the two hands. The claw type single DOF hand separates the fingers into two groups including the thumb and the rest of the fingers. The hand with its two supporting surfaces rotated with a single actuated axis allows claw type grasp. The three fingers multi DOF exoskeleton type hand lumps the fingers into three groups: (a) the thumb (b) The index and (3) the middle finger the ring and the pinky fingers. lumping the 5 fingers of the hand into 3 groups and a special alignment of the joints of the hand interface allow for comfortable manipulations of the fingers throughout the entire common workspace of each group of fingers.
• Sensing – There are two type of sensors embedded into the exoskeleton (1) position sensors (2) force torque sensors. Absolute encoders are mounted to the back shaft of all the actuators for measuring the absolute joint angle of every DOF. The human operator is physically attached to the exoskeleton arm and interacts with the system through three physical interfaces of the arm and two to three interfaces at the hand depending on the hand configuration. Three braces are attached to the upper arm, the forearm and the palm. Additional two contact surfaces of the claw type hand interface and three contact interfaces for the three fingers hand transmits forces between the exoskeleton hand and the operator’s fingers. Force sensors embedded into the braces and the supporting surfaces of the fingers enabling the operator to control the arm and the hand using an admittance control.

High Resolution Photos
Exoskeleton – EXO UL8 - Jacob Rosen
Exoskeleton – EXO UL8 - Fred Schwedner
Exoskeleton – EXO UL8 - Yang Shen & Jacob Rosen
{kind=link}
Projects
Virtual Worlds / Games With Haptics Utilizing Microsoft Robotic Studio Toolbox
Device: EXO-UL7
Methodology: Robotics Studio - Microsoft
Status: Active Research
The Human Arm Kinematics and Dynamics During Daily Activities Toward a 7 DOF Upper Limb Powered Exoskeleton
Device: Vicon System (Real-Time)
Methodology: Human Subjects -Arm Kinematics / Dynamics
Status: Completed
PUblications
(*) Note: Most of the Bionics Lab publications are available on-line in a PDF format. You may used the publication's reference number as a link to the individual manuscript.
Multimedia
![]()
Wear a Robot – Strike Stroke - TEDx Palo Alto 2018
Togather with: Frederick Schwedner, Yang Shen, and Ji Ma April 2018
MAE Professor Jacob Rosen delivered his talk entitled “Wear a Robot – Strike Stroke” at TEDx Palo Alto 2018. The talk covered his personal journey in science, exploring principles such as symmetry and redundancy and their application in human body motion, the implication of stroke on the motor control system, and his scientific efforts in developing upper limb exoskeleton systems to recover the motor control of stroke patients using dual arm modes. In these modes, both the arm affected by stroke as well as the arm that was unaffected are involved in the physical therapy, while the wearable exoskeleton system provides assistance as needed – as the patient interacts with virtual objects in virtual worlds. A dual arm physical therapy engages the left and the right hemispheres simultaneously while maximizing brain plasticity as part of the brain’s efforts to recover lost functions. The talk included a patient showing the audience the motor control implications of stroke and the physical disabilities associated with it, following by a demonstration of the dual arm exoskeleton as a system that can be incorporated into the physical therapy following stroke, and offers a paradigm shift in recovering lost motor control functions.





UCLA Dept. of MAE Press Release